[설계 및 모델링 2]
일주일 동안 시간 날 때마다 틈틈이 모델링을 했다.
link들은 직접 설계했고 모터의 경우 다른 사람이 업로드해 둔 것을 사용했다.
https://grabcad.com/library/sg90-servo-2
SG90 Servo | 3D CAD Model Library | GrabCAD
The CAD files and renderings posted to this website are created, uploaded and managed by third-party community members. This content and associated text is in no way sponsored by or affiliated with any company, organization, or real-world good that it may
grabcad.com
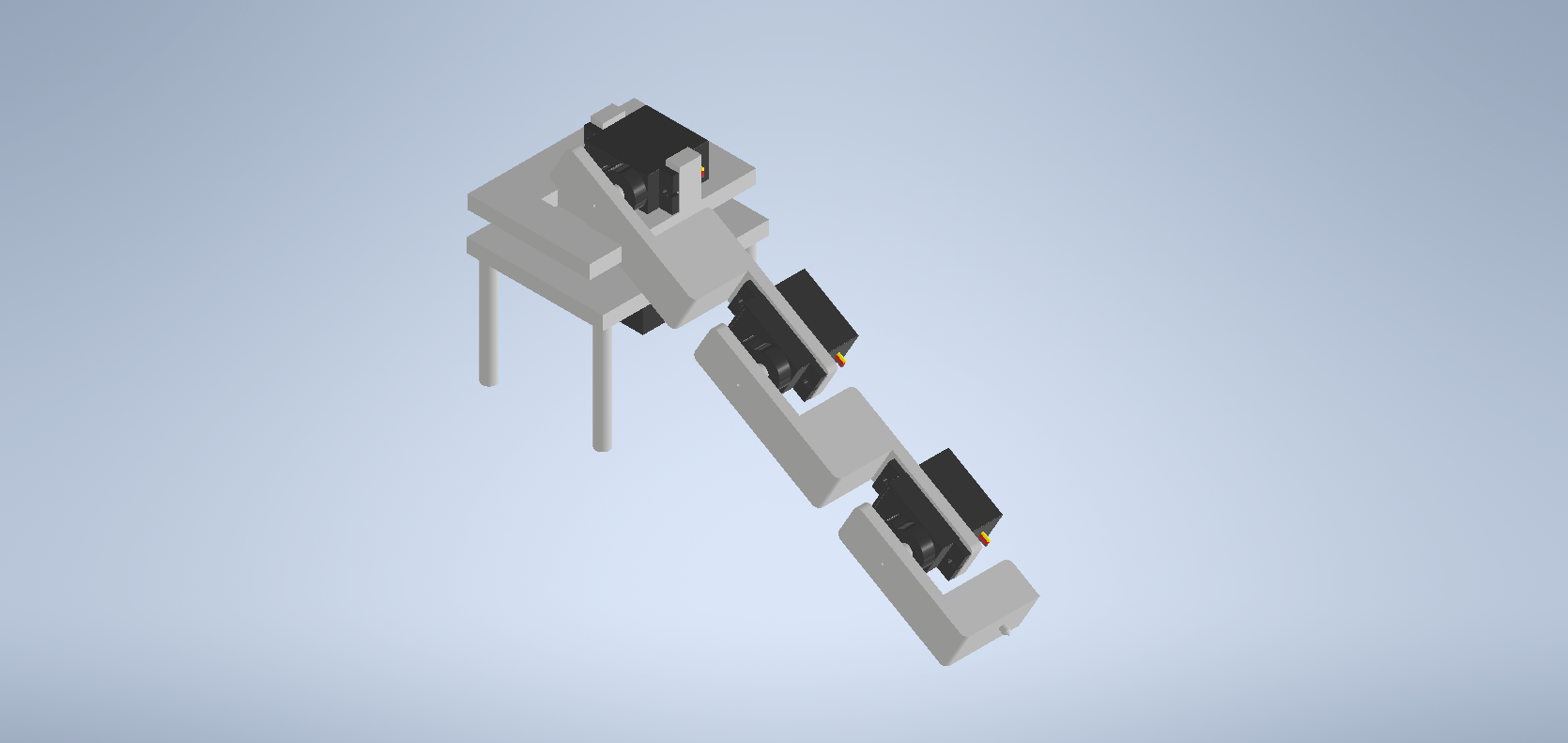
일단은 바로 프린팅하지 않고 ROS에서 시뮬레이션을 하는 게 먼저여서 자잘한 fillet 같은 것은 안 하고 가동범위 확인, URDF로 만들 때 편하게 하기 위한 원점 수정, 간단한 구조에 초점을 두고 제작했다.
여기서 간단한 구조라 함은 가능한한 링크, 조인트가 한 평면에 오도록 한 것이다.

즉 이렇게 볼 때 모든 link, joint의 모델링 상의 원점, end effect의 끝 부분이 모니터 평면 상에 위치하도록 한 것이다.
이렇게 하는게 나중에 움직임을 계산할 때 훨씬 편하게 만든다.
또 가동범위를 고려할 때 그냥 치수와 감으로만 하지 않고 inventor의 collision dectection 기능을 활용했다.
움짤처럼 joint를 움직였을 때 link의 충돌이 발생하면 이렇게 알려준다.
모델링한 link들도 cura에서 무게를 대충 확인했는데 arm은 6g으로 예상한 15g보다 훨씬 적게 나왔다.
일단은 1차 설계와 모델링이 끝났다.
이제 urdf로 옮겨서 ros에서 시뮬레이션을 하면 된다.
이번에 설계할 때 가동범위에 대해서는 나름 공학적인? 설계를 해서 이후 모델링 수정은 외형과 base에 아두이노 올릴 자리 정도만 수정하면 될 거 같다.
========================================================================
정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다.
틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글에 남겨주시면 감사하겠습니다. : )
========================================================================
'개인 프로젝트' 카테고리의 다른 글
| 2021-2 간단한 ROS연습용 로봇팔 제작 #5 (0) | 2021.12.17 |
|---|---|
| 2021-2 간단한 ROS연습용 로봇팔 제작 #4 (0) | 2021.12.17 |
| 2021-2 간단한 ROS연습용 로봇팔 제작 #2 (0) | 2021.11.10 |
| 2021-2 간단한 ROS연습용 로봇팔 제작 #1 (0) | 2021.11.09 |
| 2021-1 이족보행 로봇 제작 프로젝트 #8 (모터 영점 조정, 중단) (0) | 2021.08.08 |


