[URDF 제작 및 gazebo 업로드 2]
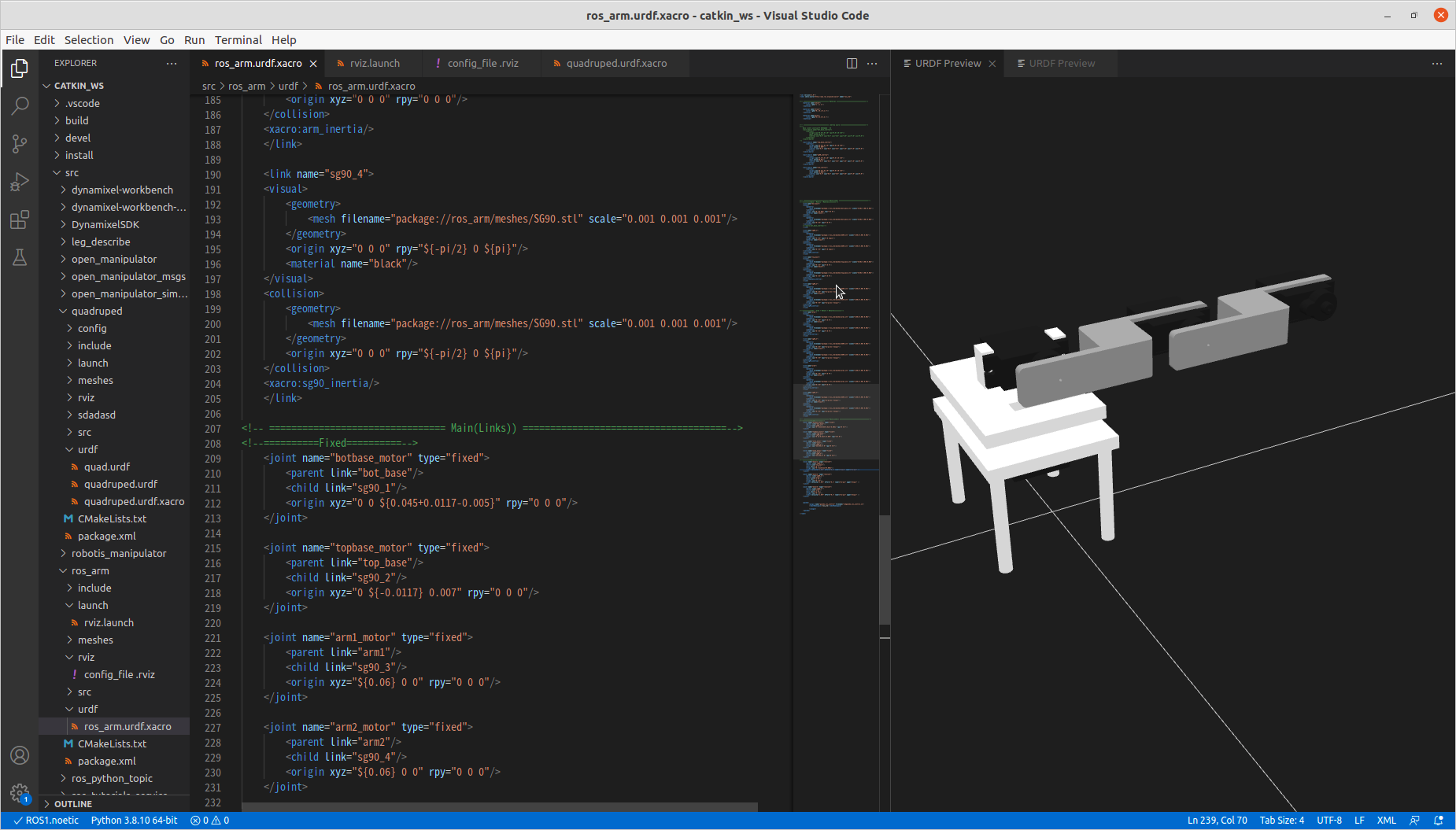
Rviz용 urdf는 완성했다.
확실히 gedit으로 작성하고 매번 rviz로 urdf를 확인하는 것보다 vscode에 urdf preview를 쓰니까 훨씬 빠르게 완성했다.
end effector 부분은 일단 빼고 제작했다.

urdf제작하면서 배운 점(이미 배웠는데 까먹었다가 다시 기억난 것)은
1. urdf 제작할 때 origin은 link에서 건들지 말고 joint에서 건드는 것이다.
2. origin의 값은 절대좌표의 원점 기준이 아닌 해당 상위 joint의 origin의 기준으로 한다.
3. 1,2의 이유로 urdf작성할 때 전체 link --> 전체 joint 순이 아닌 link1--> joint1--> link2--> joint2-->...... 순으로 작성해야 한다.
추가로 bot_base랑 sg90_1이 결합되는 구멍 치수를 잘못 잡은 거를 발견했다.
수정하자
rviz상에서는 urdf에 큰 문제가 없는 거를 확인했으니 이제 본격적으로 gazebo에 올리면 되겠다.
========================================================================
정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다.
틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글에 남겨주시면 감사하겠습니다. : )
========================================================================
'개인 프로젝트' 카테고리의 다른 글
| 2021-2+ Moveit!입문 #2 Gazebo (0) | 2021.12.27 |
|---|---|
| 2021-2+ Moveit!입문 #1 tf2 (0) | 2021.12.23 |
| 2021-2 간단한 ROS연습용 로봇팔 제작 #4 (0) | 2021.12.17 |
| 2021-2 간단한 ROS연습용 로봇팔 제작 #3 (0) | 2021.11.15 |
| 2021-2 간단한 ROS연습용 로봇팔 제작 #2 (0) | 2021.11.10 |



