[설계 및 모델링 1]
앞서 정한 기본 특징을 다시 적어보면 다음과 같다.
-4 dof
-sg90 4개
-배터리 6V~6.6V (미정)
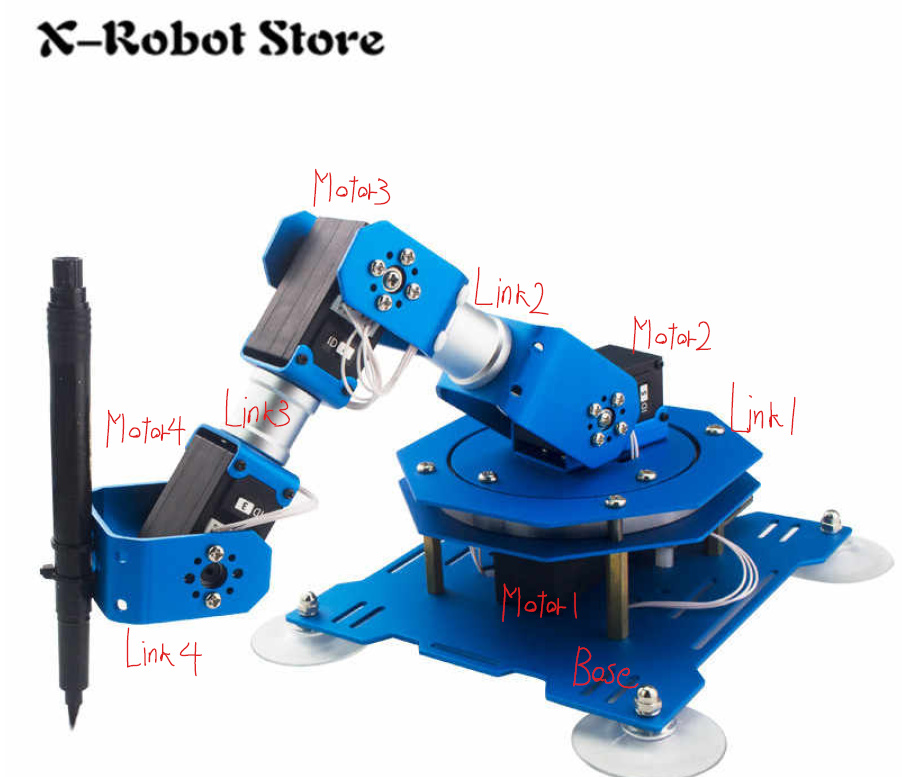
시중에 있는 4 dof robot arm을 보면 링크-모터-링크-모터의 단순한 구조가 아니라 중간에 링크를 추가하고 중간의 모터를 base 쪽으로 옮겨 모터에 걸리는 토크를 줄이는 식으로 된 것이 많았다.
https://ko.aliexpress.com/item/32793264515.html
15050.0₩ 5% OFF|공식 iSmaring DIY 4DOF 아크릴 로봇 팔, Arduino 키트와 로봇 발톱 기계식 그랩 조작기 Diy
Smarter Shopping, Better Living! Aliexpress.com
ko.aliexpress.com
+) 다시 생각해봤는데 이렇게 만들면 4 dof가 맞나?라는 의문이 들었다.
하지만 나는 그냥 링크-모터-링크-모터 식의 단순한 arm을 만들려고 한다.
우선 sg90의 datasheet를 참고하고, 로봇에 쓰일 링크를 대강 생각해서 모터의 토크 계산을 해봤다.
-sg90 : 10g
-Link2,3 : 15g, 6cm
-Link4 : 15g, 3cm
+sg90의 datasheet가 너무 많고 다 조금씩 달라서 그중 최댓값으로 계산을 했다.
+Link1은 회전 방향이 토크가 크게 걸리는 방향이 아니라 계산에서 뺐다.
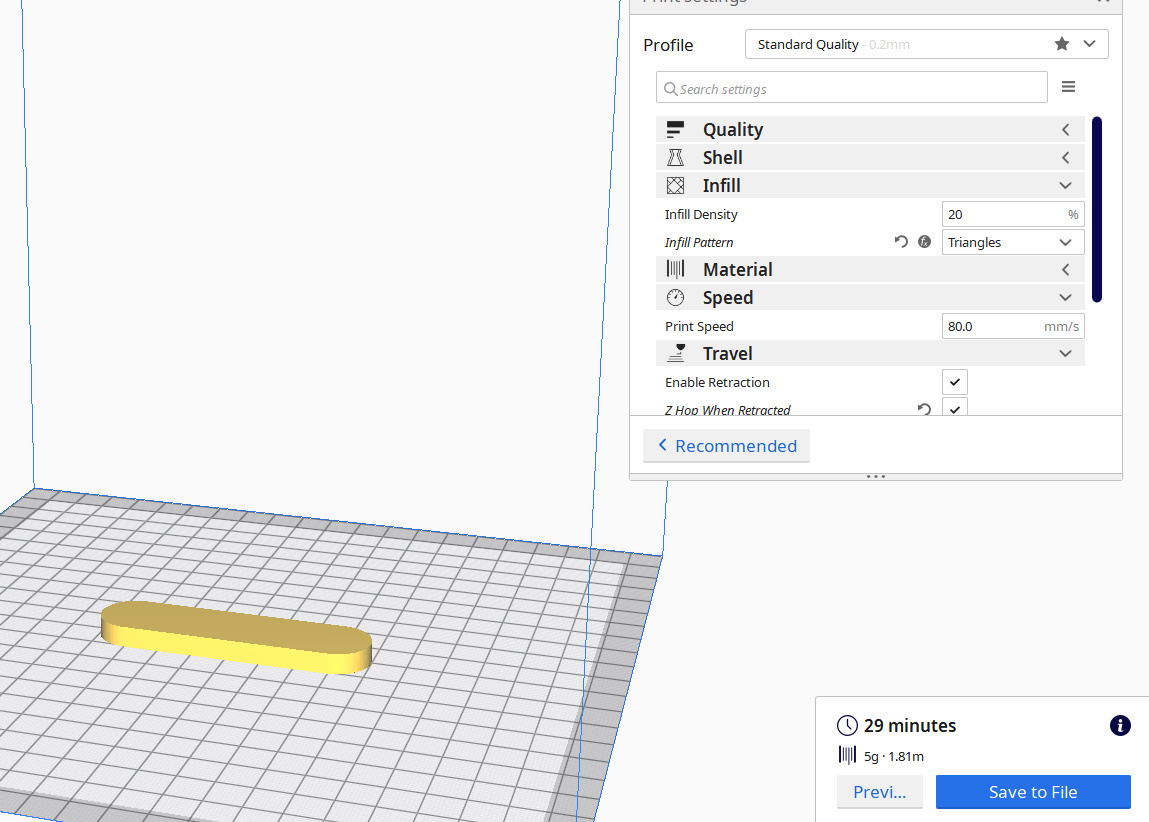
+) 위 사진은 Link 2,3을 대강 모델링해서 무게만 확인한 것이다. infill 20%에 5g 정도 나오니 나중에 infill 늘리거나 링크가 복잡해질 것을 감안해서 대충 15g으로 계산했다. Link4는 end effector가 달릴 것이기도 하고 구조가 어떻게 될지 몰라서 더 넉넉하게 30g을 줬다.
계산은 아래 사이트를 이용했다. 직접 하는 건 복잡해서(귀찮아서) 아래 계산기를 썼다.
https://www.robotshop.com/community/tutorials/show/robot-arm-torque-calculator
Robot Arm Torque Calculator | RobotShop Community
The Robot Torque Arm Calculator is intended to help you choose the right motor for each joint of your robotic arm. The torque (T) required at each joint is calculated as a worst case scenario (lifting weight at 90 degrees). Ensure your units are consistent
www.robotshop.com

T6부터 T4까지가 각각 모터 2, 모터 3, 모터 4에 걸리는 링크, 모터 질량에 의한 토크 계산 결과이다.
링크, 모터 무게를 최대로 잡고 추가로 end effector에 15g (A3칸)을 줬는데도 모터 2에 1.08kg*cm밖에 안 걸렸다.
sg90의 6v에서 torque가 1.6kg*cm 인 것을 감안하면 여유롭다.
+) datasheet에 있는 9g이라는 무게가 줄 무게 제외이고 실제는 12g라는 글을 봤는데 그래도 1.13kg*cm로 여유로웠다. 직접 재보는 게 가장 정확한데 부품이 전부 자취방에 있다....
하여튼 sg90으로 내가 원하는 형태의 로봇 팔을 만들 수 있는 것으로 1차적으로 확인했고 이제 본격적으로 모델링을 시작하면 될 거 같다.
===============================================================================
정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다.
틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글에 남겨주시면 감사하겠습니다. : )
===============================================================================
'개인 프로젝트' 카테고리의 다른 글
| 2021-2 간단한 ROS연습용 로봇팔 제작 #4 (0) | 2021.12.17 |
|---|---|
| 2021-2 간단한 ROS연습용 로봇팔 제작 #3 (0) | 2021.11.15 |
| 2021-2 간단한 ROS연습용 로봇팔 제작 #1 (0) | 2021.11.09 |
| 2021-1 이족보행 로봇 제작 프로젝트 #8 (모터 영점 조정, 중단) (0) | 2021.08.08 |
| 2021-1 이족보행 로봇 제작 프로젝트 #7 (골반, 상체 설계3 / 발바닥) (0) | 2021.08.05 |


