지난번 발바닥을 완성한 것으로 1차적인 로봇 제작은 끝났다.

어디까지나 1차적인 모델일 뿐, 코딩을 하다 구조적으로 도저히 안되는 부분은 계속 수정을 할것이다.
처음부터 수학적, 기구학적으로 전부 계산해서 만들었으면 안해도 되거나 사소한 거만 했을수도 있는데 아직 내가 그 정도의
설계 실력이나 지식이 부족하다.
나중에 3학년때 기계설계 때 이런거 배우는 건가?
이제 본격적인 코딩에 앞서 모터들의 영점과 회전 방향을 조정해줘야 한다.
하지만 그전에 확인해야 할 게 있다.
지난 #4(골반, 상체 설계1) 글에서 궁금했던 부분인 tim 소프트웨어의 각도와 아두이노 프로그램의 각도가 같은 값인가 아님 식으로 계산해줘야 하는가를 알아봐야한다.
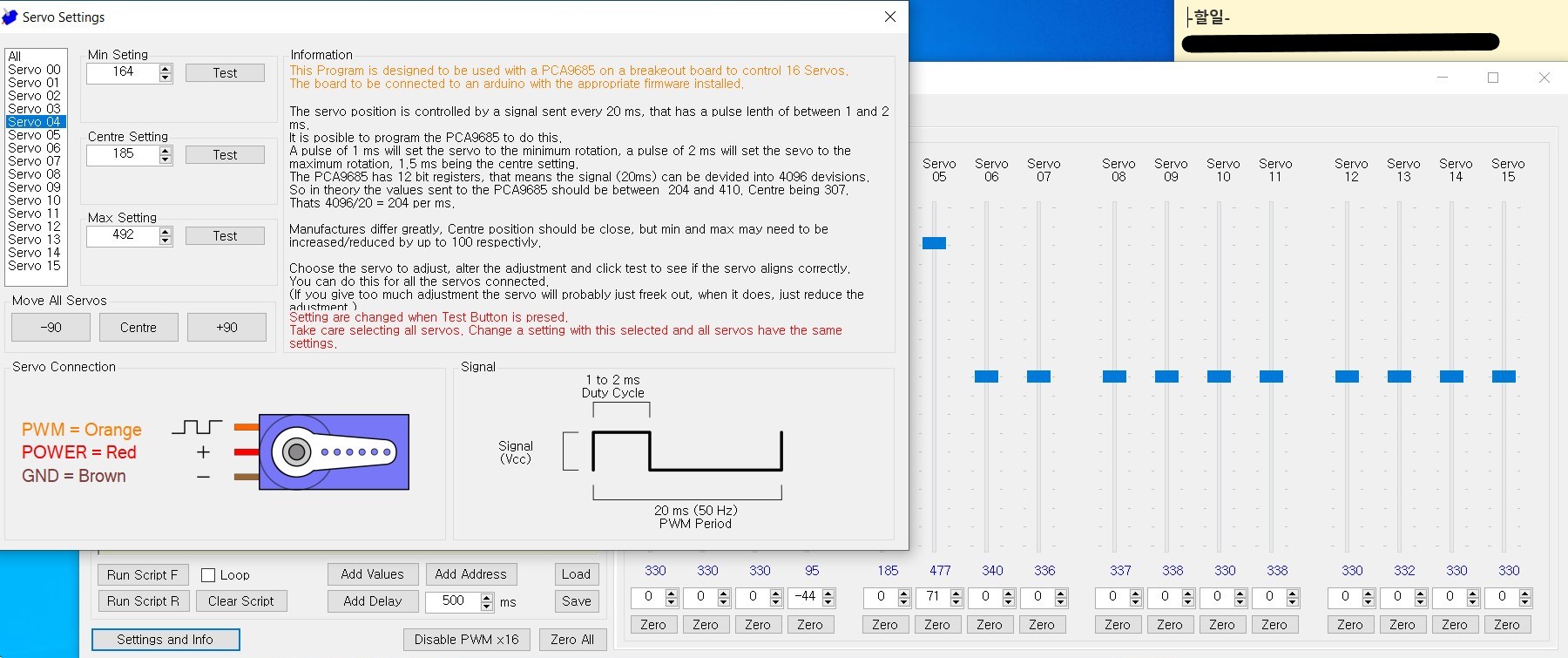
tim프로그램을 보면 Min setting, Centre setting, Max setting이 있다.
얘를 조정해서 모터의 최소각, 최대각을 찾고 그에 따른 중심각(영점)을 찾아주면 된다.
중심각=(최소각+최대각)/2 으로 구했다.
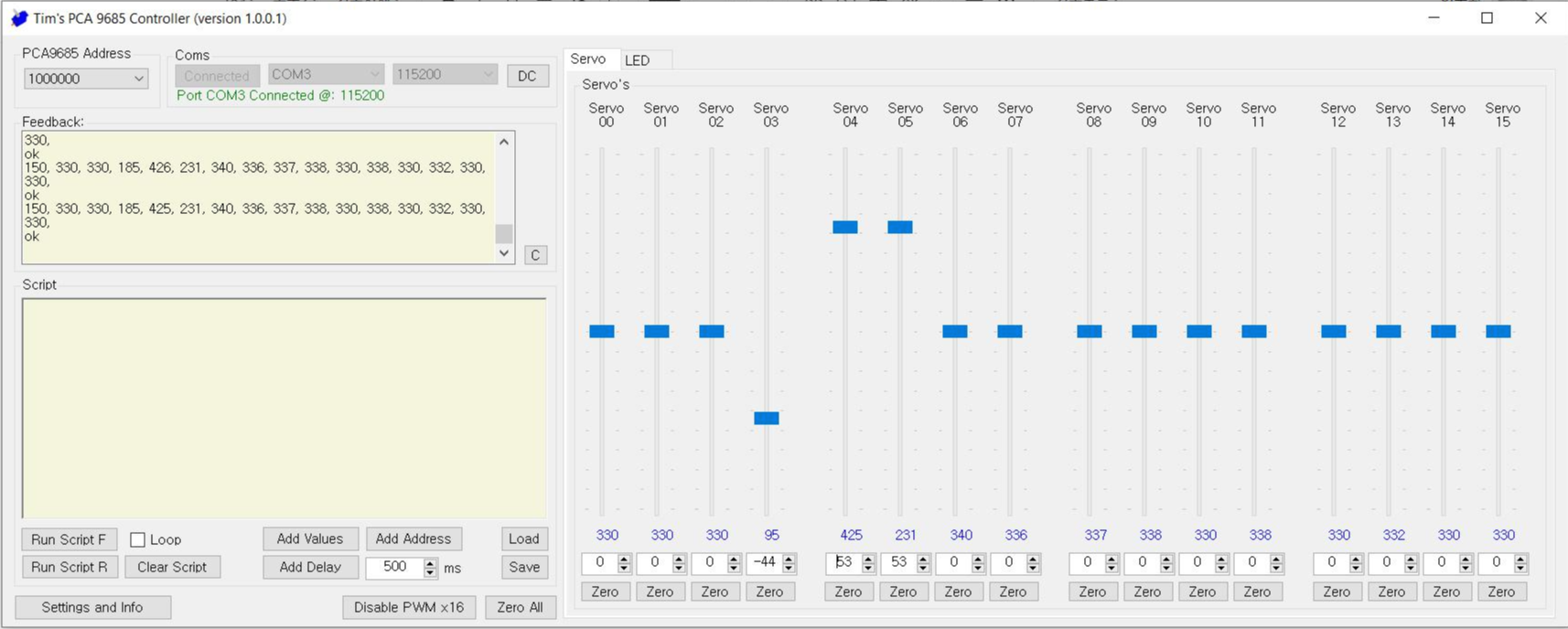
영점 조정 전에는 골반 모터가 평행이 되게 하는 슬라이더의 위치가 위아래 방향도 다르고 값도 달랐다.
하지만 영점 이후에는 둘다 슬라이더를 위쪽으로 54에 맞추면 평행이 된다.

당연한 거고 tim프로그램의 안내에도 써있었지만 같은 모델의 모터는 거의 영점조정 값이 똑같다.
------------------------------------------------------------------------------------------------------------------
갑자기 c-2345 팀에 합류하게 되어서 첫 미팅을 갔다왔는데 솔직히 느낀것은 이족보행을 나름 전문적(?)으로 접근 했다고 생각했지만 결국 예전 중,고등학교 때랑 크게 바뀐게 없다는 것이였다.
더 정확하게 정리해보면
1. 기구학과 정역학을 배웠음에도 모터 토크와 다리 길이등을 계산하지 않았고 하다못해 DOF라도 계산했어봐야 전문적이다의 ㅈ이라도 쓸탠데 전혀 그러지 않았다.
2. 논문이나 자료를 찾아서 이족보행 설계의 중요한 부분, 걷기 프로그램 알고리즘 등 중요한 것을 조사하지 않았다. 심지어 이럴 때를 위해 영어공부를 그렇게 했는데 말이다.
3. 아두이노와 다른 개발자가 만든 외부 모터제어 프로그램 (TIM)을 쓸려 했지만 훨씬 전문적이고 편하며 대세인 ROS라는 프로그램의 존재를 알게 되었다.
3은 그렇다쳐도 1,2는 내가 잘 모른다는 생각에 그냥 어떻게든 되겠지 하면서 넘어갔던 거 같다.
앞에서 너무 자책만 한 거 같지만 그래도 로봇 제작은 꽤 오랬동안 쉬었기도 하고 3d프린팅으로 부품을 만드는 감을 찾았다는 부분에서 막무가내로 이족보행을 만든 것은 정말 잘한게 맞다고 생각한다.
그 과정에서 얻은 배터리 지식도 실제로 앞으로도 매우 도움이 될 거 같기도 하다.
(실제로 C2345 회의 때 배터리 관련 부분은 내가 주도했던거 같다.)
결론
이족보행은 잠시 중단해두고 C2345에서 형들한테 배우고 또 내가 ROS를 공부하고 그 이후에 이족보행을 다시 본격적으로 하려고한다.
그 과정에서 어떤 식을 쓰거나 어떤 자료를 봐야하는지, 어떤 알고리즘을 적용해야 하는지, 멀리나가 이런 로봇 제작은 어떤 과정을 거쳐야 하는지도 약간이나 배울 수 있을 거 같다.
아예 2족 보행을 중단한다는 것은 아니다.
더 배우고 다시 할 것이다.
많이 배운다.
계속 노력하자.
===============================================================================
정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다.
틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글에 남겨주시면 감사하겠습니다. : )
===============================================================================
'개인 프로젝트' 카테고리의 다른 글
| 2021-2 간단한 ROS연습용 로봇팔 제작 #2 (0) | 2021.11.10 |
|---|---|
| 2021-2 간단한 ROS연습용 로봇팔 제작 #1 (0) | 2021.11.09 |
| 2021-1 이족보행 로봇 제작 프로젝트 #7 (골반, 상체 설계3 / 발바닥) (0) | 2021.08.05 |
| 2021-1 이족보행 로봇 제작 프로젝트 #6 (골반, 상체 설계2) (0) | 2021.07.26 |
| 2021-1 이족보행 로봇 제작 프로젝트 #5 (Motor control software) (0) | 2021.07.25 |


