
Articles/References
https://www.nature.com/articles/s41467-024-47788-2
https://www.youtube.com/watch?v=aNw92VlH3rA
About - Freeform Robotics
Who Are We? Established in 2019 and directed by Prof. Tin Lun LAM, the research group is committed to collaborating with leading international experts to research leading-edge robotic technologies to give impetus to the application of the technologies in n
freeformrobotics.org
Summary
*ppt 1장으로 핵심 부분만 summary 하는 방식을 적용해 봤습니다. (글 최상단) 아래 summary는 한글로 좀 더 다양한 분들이 이해하기 쉽도록 구성하였습니다.
1. 달팽이(land snails)에서 영감을 얻어 고안한 군집 로봇(robot swarm)에 대한 논문이다.

●달팽이들이 서로의 껍질에 붙어서 어떤 구조를 형성하는 것에서 영감을 받아서 고안하였다.
●기존의 군집로봇과 달리 실외(outdoor)의 복잡하고 불규칙적인 환경에서의 동작을 전제로 설계하였다.
●특정 부분으로만 결합이 가능한(dock to dock) 것이 아닌, 다른 로봇의 구형 껍질 어디에서든 결합이 가능하다. 이는 더 자유롭고 다양한 형태의 결합이 가능함은 물론, 결합으로 형성된 로봇이 더 큰 자유도(DOF)를 가질 수 있음을 의미한다.
●개별 로봇의 이동은 기본적으로 2개의 트랙을 이용하며, 로봇 간 연결은 트랙의 영구자석(permanent magnet)을 이용한 방식과 공압을 이용한 흡입기(sucker)를 이용한 방식 2개로 나눠진다. 연결부의 목적에 따라 사용하는 방식이 다르며 Free mode와 Strong mode로 나눌 수 있다.
2. Free mode connection
●오직 트랙의 자석만을 이용해 다른 로봇의 구형 껍질에 붙어 있는 모드이다.
●이 모드에서는 구형 트랙의 표면을 자유롭게 이동할 수 있기에 3자유도를 갖는다. (3DOF = Sperical translation 2DOF + Yaw rotation DOF)

●이 모드는 결합력이 약한 대신 높은 자유도를 기반으로 군집의 장애물 극복, 결합으로 형성된 로봇의 end-effector의 구성에 사용된다.
●결합력이 약하여 이 모드로는 추가적인 로봇 없이 오직 자신만 다른 로봇에 붙을 수 있다.
●영구자석을 이용하기에 분리(disassemble)을 위한 추가적인 장치를 예상했지만 트랙으로 발생하는 추진력과 자력, 그리고 설계 파라미터들을 절묘하게 계산해서 단순 이동만으로 분리가 가능하게 한 것으로 보인다. (내 생각)

●한편 트랙을 일반 무한궤도나 체인처럼 rigid한 link를 사용한 것이 아닌 타이밍 벨트 같은 elasticity가 있는 고무를 사용했는데 이는 ⓐ더 가볍고, ⓑ구형 표면에 자석트랙이 더 잘 붙을 수 있다는 장점이 있다고 한다.
+)개인적으로 이런 세부적인 부분에도 의도를 갖고 설계한 것을 좋아한다.
3. Strong mode connection
●트랙의 자석과 더불어 공압을 이용하여 붙어 있는 모드이다.

●이 모드는 자유도보다는 강한(robust) 연결력을 목적으로 두고 있다.
●Sucker가 다른 로봇의 껍질표면에 붙은 상태로 펌프에 의해 공압이 걸리면 강한 결합력이 형성된다. 이는 달팽이가 표면에 붙어 있는 방식을 모방한 방법이다.
●Sucker의 내부에는 미세한 털?(DPS, Directional polymeric stalks)이 있는데 이는 게코 도마뱀(gecko)의 발바닥을 모방한 것으로 sucker의 외부 load(Shear force, bending, Torque)에 대한 저항력을 증가시켜 준다.
+)Normal force도 증가시켜 주지만 상대적으로 증가량이 적기도 하고 저자도 주된 효과로써 보지 않았다.
●Strong mode일 때는 오직 웜 기어(worm gear)에 의한 Yaw rotation만 가능하여 1 자유도를 갖는다.
+)이 부분에 대해서 논문을 처음 읽을 때 '왜 굳이 트랙을 이용해서 yaw rotation을 하지 않고 웜 기어를 추가했는지' 궁금했었다. Strong mode의 목적과 적용방법을 봤을 때 기구를 추가해서 잃는 것(무게, 복잡성)보다 얻는 것(yaw 회전 안정성)이 더 컸기에 이를 적용했다고 나름 분석해 봤다.
● 단순히 sucker에 모터를 수직 하게 연결하지 않고 웜 기어를 사용한 이유는 worm gear의 self-locking을 이용하기 위함이다. 이를 이용해 yaw방향 외부 토크에 대한 저항력을 증가시켰다.
●Strong mode는 최대 4개의 로봇을 지탱할 수 있다고 한다. 외팔보 형태(Cantilever beam) 형태를 기준으로 4개이며, 추가적인 지지 구조가 있는 경우 더 버틸 수 있는 것으로 보인다.
4. 로봇 각각의 이동은 물론, 군집은 총 6가지의 task를 수행할 수 있다.
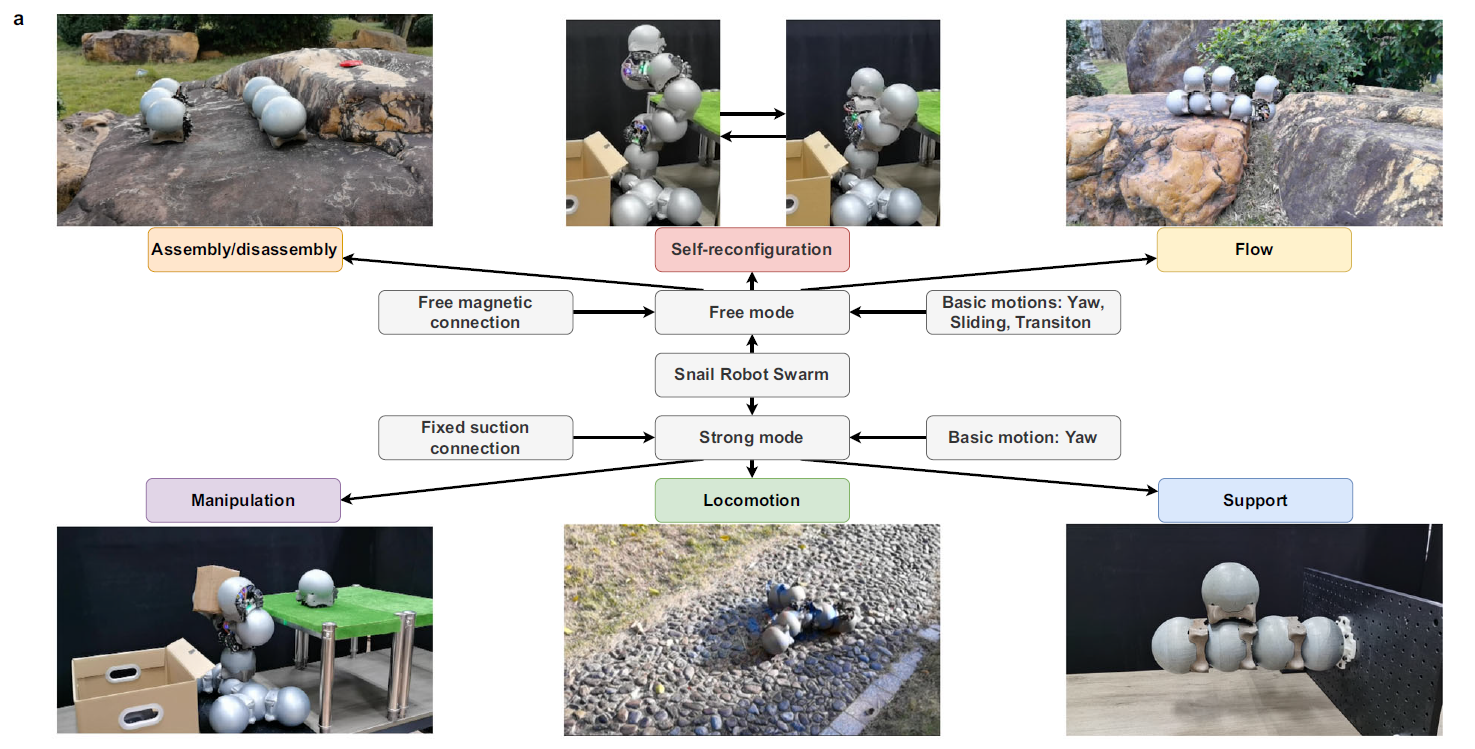
●이 부분은 글로 설명하기보다 영상을 보는 것이 이해가 빠를 것이다.
My opinion
●군집 로봇이 하나의 큰 로봇을 만들어 여러 task를 하는 것보다도 2가지의 connection mode라는 concept과 mode별 특징을 잘 분리시킨 것이 인상 깊었다. 특히 영상에서 locomotion에 해당하는 task를 보여주었는데 이게 개인적으로 굉장히 재밌었다. (영상 6:27~)
●영구자석의 단점이 자력을 없앨 수 없다는 것인데 이 때문에 탈착이 필요한 상황에는 적합하지 않다고 생각했었다. 그런데 이번 논문에서는 이를 트랙의 peel-off motion으로 영구자석을 떼어냈다. 추후 자석을 이용한 locomotion을 사용할 때 전자석을 사용하는 대신 이러한 방식을 고려해 보는 것도 좋을 것 같다.

●군집 중 일부 로봇은 shell 대신 바퀴형, gripper의 한쪽 형태 등으로 제작하여 task의 성능을 더 향상하는 방법도 좋을 것 같다.
●이 논문의 figure나 표현 방법이 개인적으로 배울 점이 많다고 느꼈다.
Additional keywords
●Worm gear self locking: 그저 웜 기어에 이런 특징이 있다는 것만 알고 있었을 뿐, 이를 브레이크로써 이용해 볼 생각은 하지 않고 있었다. 추후 내 프로젝트에서 좋은 도구가 될 것 같다.
●논문의 중요한 부분은 아니고 설계 및 구현 최적화 과정에서 Genetic algorithms, library addressing, gradient descent(이건 수치해석 때 배운 그게 맞는지는 모르겠다.)등을 사용했다고 한다. 지금 당장 이들을 공부하기보단 추후 이 키워드가 다른 논문이나 공부과정에서 나오면 이 논문을 기억해 어떻게 적용했는지 공부할 생각이다.
●이 논문의 reference 66의 "Computational Design of Robotic Devices From High-Level Motion Specification"(Sehoon Ha et al.)이 제목도 그렇고 내게 필요하며 배울 것이 많을 것 같다는 생각이 들었다. 조만간 읽고 꼭 정리해 볼 생각이다.
https://ieeexplore.ieee.org/document/8395009
Computational Design of Robotic Devices From High-Level Motion Specifications
We present a novel computational approach to design the robotic devices from high-level motion specifications. Our computational system uses a library of modular components-actuators, mounting brackets, and connectors-to define the space of possible robot
ieeexplore.ieee.org
========================================================================
정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다.
틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글에 남겨주시면 감사하겠습니다. : )
========================================================================



