
Articles/References
https://doi.org/10.1002/aisy.202300866
https://sites.northwestern.edu/roboticmatterlab/
Robotic Matter Lab | Prof. Ryan Truby | Northwestern University
Inspired by the stark performance gap between robots and living organisms, our research aims to advance machine intelligence through material design. Our mission in the Robotic Matter Lab is to develop material systems whose forms and functionalities give
sites.northwestern.edu
https://www.irobotnews.com/news/articleView.html?idxno=35474
美 노스웨스턴대, 사람 근육 닮은 소프트 로봇 개발 - 로봇신문사
미국 노스웨스턴대 연구팀이 사람의 근육처럼 팽창과 수축이 가능한 소프트 액추에이터를 개발했다고 10일(현지 시각) 밝혔다. 이 소프트 액추에이터...
www.irobotnews.com
Summary
1. 원통 형태의 HSA structure 내부에 고무 벨로우즈를 넣어 만든 소프트 엑추에이터다.
●HSA structure는 Handed Shearing Auxetic structure로, Handed Shearing으로 작동하는 Auxetic strucuture이다.
https://www.youtube.com/watch?v=53NXnPTG9Ik
위 영상을 보면 HSA가 어떤 식으로 작동하는지 쉽게 알 수 있을 것이다.
●Auxetic structure(팽창구조)는 독특한 내부 구조 때문에 음수의 푸아송비를 갖는다. 즉 일반적인 물체와 달리 길이가 늘어나도 두께가 줄어들지 않고 오히려 늘어난다.
https://en.wikipedia.org/wiki/Auxetics
Auxetics - Wikipedia
From Wikipedia, the free encyclopedia Materials that have a negative Poisson's ratio Auxetics are typical structures of the representative mechanical meta-materials. Mechanical meta-materials are structures whose mechanical properties are artificially deri
en.wikipedia.org
(내 생각)
분야마다, 적용하는 곳마다 사용목적이 다르겠지만, 내가 생각했을 때 soft robotics 분야에서 이를 채택한 이유는 HSA cylinder 내부의 공간을(단면의 넓이를) 유지할 수 있기 때문인 것 같다.
Robotics에서 소형화는 중요한 문제이고 이를 위해 좁은 공간에 많은 요소를 집어넣게 되는데, 만약 양의 푸아송비를 가진 구조를 사용하면 내부 공간이 좁아지기에 길어질 수 있는 정도에 한계가 명확해지고, 아예 불가능하기도 할 것이다.
하지만 auxetic structure를 사용하면 내부에 많은 부품을 채우고도 길이 확장에 따른 공간의 좁아짐을 걱정하지 않아도 된다.
●앞에 붙은 Handed Shearing은 이 auxetic 구조의 작동 방법을 내포하고 있는 표현으로, 이 cylinder 형태의 auxetic에 Torsion을 걸어 표면에 shear force를 발생시켜 주면 길이 방향으로 길어진다. 이는 위의 영상에서도 잘 확인할 수 있다.

쉽게 설명하면 '표면이 + 같은 방향으로 회전하는 배열의 + 여러개의 4절 링크'로 되어 있다고 할 수 있을 것 같다.
엄청 단순화하면 위 구조가 말려 있는 옆으로 말려있는 구조인 것이다.
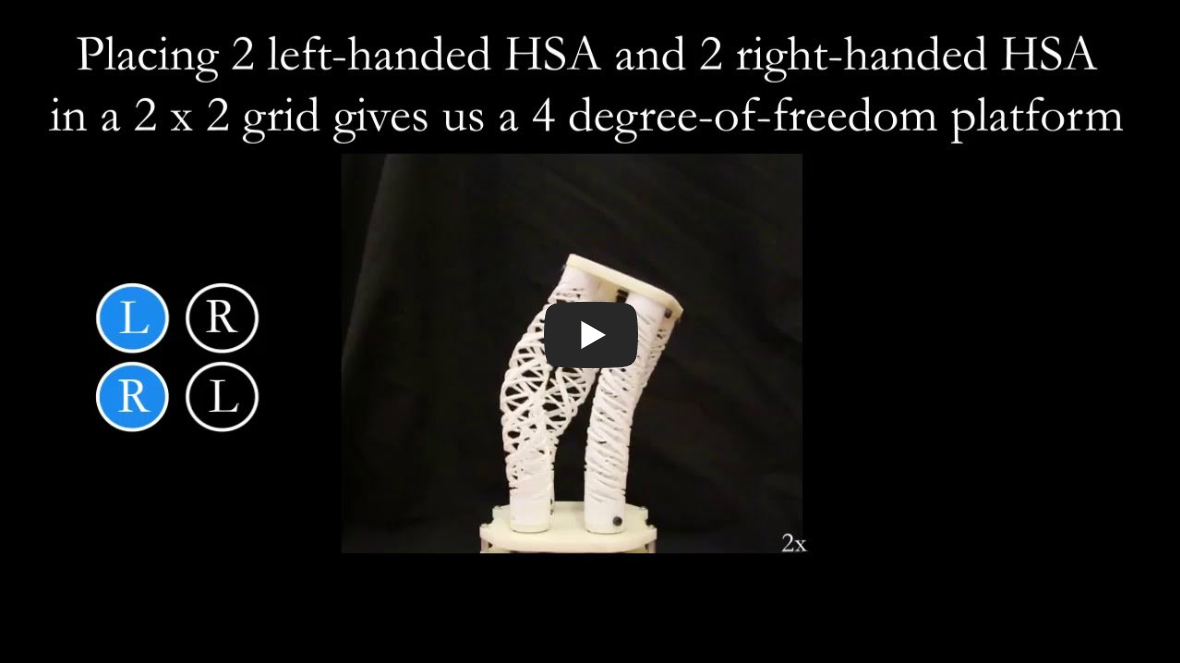
●한편 HSA에 Torsion을 걸어주려면 한쪽 끝은 회전하고 반대쪽 끝은 회전하는 구조가 필요하다.(너무 당연하다 걸레를 한쪽만 잡고 돌린다고 짜지지 않는 것과 같은 이치다.)
기존의 HSA actuator들은 여러 개의 HSA를 배치해서 이를 해결했다. 앞선 MIT의 유튜브 영상에 나온 예도 마찬가지이다. 하지만 이런 구조는 부피를 키울 뿐만 아니라 stiffness를 키워서 bending을 방해한다.(bending 관련 부분은 3에서 다룬다.)
이 논문의 HSA actuator는 HSA cylinder 내부에 고무 벨로우즈*를 torsion을 위한 고정 축으로써 배치하였다.
(고무 벨로우즈는 쉽게 생각하면 미술시간 때 사용했던 수채화 물통을 생각하면 된다.)

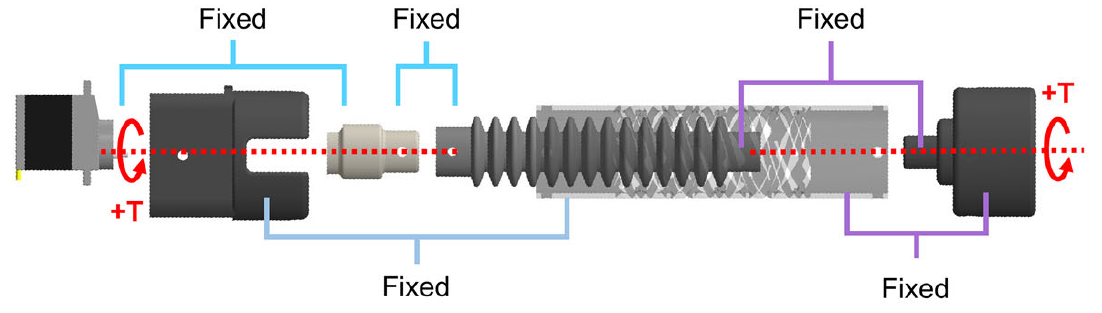
좌측의 서보모터를 base로 보면, 고무 벨로우즈의 좌측 끝은 base에 고정되어 있고 우측 끝은 HSA의 우측 끝에 고정되어 있다. 여기서 HSA 좌측 끝에 연결된 서보모터가 회전하면 HSA 입장에선 우측은 고정, 좌측은 회전하기에 Torsion이 걸리게 된다.
여기서 벨로우즈를 사용한 이유가 잘 드러난다.
벨로우즈는 구조 상 길이 뱡향의 자유도가 있으며, Torsion rigidity가 높기에 HSA와 같이 늘어나면서 한쪽 끝이 회전하지 않도록 잡아 Torsion이 잘 걸리도록 해준다.
+)하지만 Torsion rigidity가 높을 뿐, 아예 torsional deflection이 발생하지 않는 것은 아니며 이는 논문의 figure 4d를 보면 확인할 수 있다.
● 결국 위와 HSA structure와 고무 벨로우즈를 사용한 구조를 통해 linear actuator를 구현한 것이다.
2. 서보모터 1개만을 사용하기에 여러 개 사용한 HSA actuator보다 자유도는 낮지만 직관적인 제어가 가능하다.
●단순히 서보모터 1개에 대해서 servo motor angular position(θ)-elongation(%)의 관계만 찾으면 position 제어가 가능하다.
●Servo torque-pushing/pulling force의 관계를 이용할 수 도 있다.
●다만 소재와 구조의 특성상 viscoelasticity(점탄성)을 갖기에 linearity를 보이지는 않는다.
3. HSA와 벨로우즈 모두 구부릴 수 있기에, 구부러진 상태에서도 작동이 가능하다.
●Soft actuator의 중요한 장점 중 하나는 flexibility, 유연함이다. 하지만 HSA를 여러 개 사용한 구조는 flexual rigidity가 커져 구부리는 게 쉽지 않고, 이는 soft actuator의 중요한 장점을 약화시킨다.
(막대 1개와 여러개를 구부리는 것의 차이와 같다.)
●이 논문의 HSA actuator는 HSA를 1개만 사용했기에 flexual rigidity가 작고, 또한 내부의 벨로우즈 또한 bending이 가능하기에 soft actuator의 장점을 저해하지 않는다.
4. 내부의 벨로우즈가 HSA의 torsional buckling을 방지해 준다.
5. 논문의 HSA linear actuator는 45%의 길어지는 것이 가능하며, 최대 8N으로 미는 것이 가능하다.
6. Tendon base actuator와 달리 1개의 HSA actuator로 pushing/pulling이 가능하다.
●Tendon actuator는 2개가 필요하다.
7. 연구팀은 이 HSA linear actuator을 이용하여 좁은 곡선 구간을 지나갈 수 있는 crawling robot과 동물의 근육과 같은 방식의 1 DOF manipulator를 만들었다.
Crawling robot navigates tight spaces
https://www.youtube.com/watch?v=rUjz8pZ0uRA

●구불구불한 파이프 내부 탐사 목적으로 324mm/min(0.02BL/sec)의 속도로 움직일 수 있다. 많이 느리지만 개인적으로 구조의 단순함을 고려하면 발전할 여지는 있다고 생각한다.
●끝부분 회전을 상쇄하기 위해 Front anchoring module과 HSA actuator의 연결부에 베어링을 사용했다.
●본 논문은 actuator가 메인은 논문으로 로봇의 성능보단 가능성에 집중하는 것이 맞다.
Artificial muscle

●팔의 Bicep(이두근)과 같은 방식의 1 DOF manipulator이며 pushing보다 큰 10N힘으로 link를 당길 수 있다. 이는 HSA의 구조적 특성이 아닌 HSA의 소재로 사용한 TPU소재의 strain에 따른 strain energy 때문이다.
(당겨진 고무줄이 당기는 힘을 보태준다고 생각하면 된다...)
개선점, 내 생각
1. 작동 과정에서 발생하는 벨로우즈의 약간의 torsional deflection과 이로 인한 pulling force가 성능을 저하하는 원인으로 이를 해결하는 것이 1차적인 성능 향상의 방향이 될 것이다.
2.(내 생각, 개인 기록) 벨로우즈가 아닌 rigid한 여러 link의 구조로 bending이 가능하면서 stretching이 가능한 형태를 대충 생각해 봤고 숨김 글로 스케치를 올렸다. (혹시 또 몰라서 공개는 안 한다 ㅎㅎ)
3. (내 생각) 이 HSA actuator의 벨로우즈 내부에 tendon을 추가하면 작은 부피의 3 DOF(stretch, θ, φ)의 actuator를 만들 수 있지 않을까 싶고 이는 continuum robotics의 arm이겠다고 생각한다. 이 연구를 한 사람이 없다면, continuum robotic의 기초를 쌓은 후 해보면 재밌을 것 같다.

기타 논문에서 얻은 keywords
Soft actuator로 현재 연구되고 있는 기술들 :
Dielectric elastomer actuator (DEA)
●작동에 고전압 필요
Electrically-controllable electroactive polymer(EAP)
Liquid crystal elastomer (LCE)
●HSA actuator보다 느리다고는 하는데 어느 정도인지는 확인이 필요하다.
형상기억합금(SMA)
========================================================================
정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다.
틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글에 남겨주시면 감사하겠습니다. : )
========================================================================



