2023 로보월드는 10/11-14였고 나는 마지막 14일에 다녀왔다.
이후에 시험 기간도 껴있고 개인 프로젝트를 진행하느라 바빴어서 이제야 후기를 남긴다.

여러 목적을 위한 매니퓰레이터, 로봇 핸드, 이동형 로봇등 많은 로봇을 봤지만 내가 이상 깊었던 것 들만 정리해 봤다.
●한국기계연구원(KIMM)
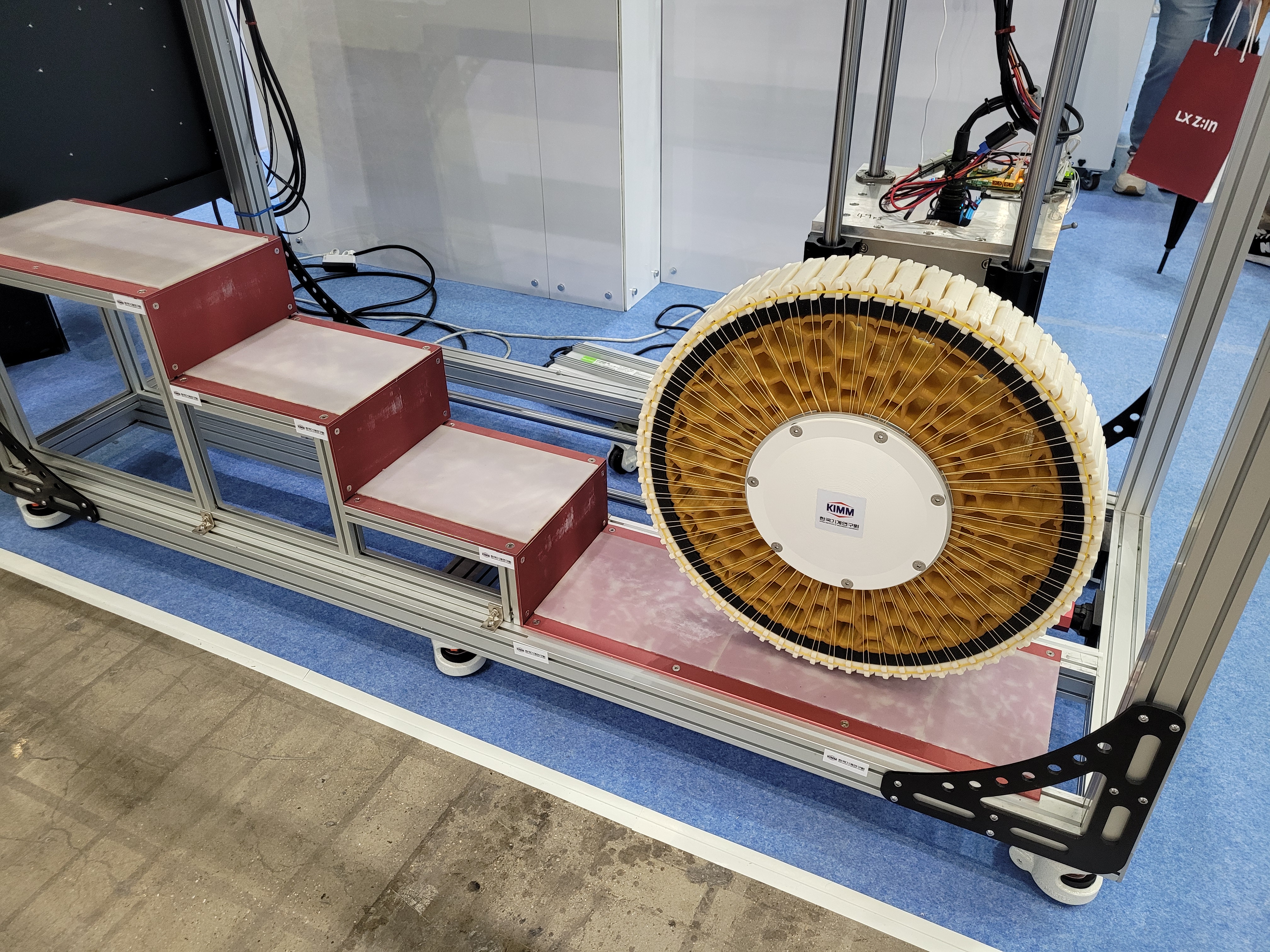
이전에 기사를 통해 봤던 KIMM 송성혁 박사님의 변형 휠을 실물로 봤다.
안타깝게 실제 작동은 보지 못했지만 rim, spoke부분을 실물로 보니 어떤 식으로 작동하는지 좀 더 와닿았던 것 같다.
특히 spoke의 형상과 소재의 특성을 적절히 설계하는 것이 중요할 것 같다는 생각이 들었고 biomimetics 분야의 공부를 하려고 하는 만큼 다양한 소재를 다뤄보는 경험도 필요하겠다는 생각도 들었다.
● MOBINN

MOBINN이라는 자율주행배달 로봇으로 라이다(LiDAR), 초음파 센서, depth카메라 등을 이용하여 자율주행을 한다. 하지만 내가 관심 있던 것은 앞선 KIMM의 것과 마찬가지로 바퀴였다.
●RoDEL (한양대학교)
사실 이번 로보월드에서 가장 오랫동안 머물렀고 가장 기억에 남는 부스가 RoDEL의 부스였다.
RoDEL
Robot Design Engineering Laboratory conducts research on novel robotic platform design, analysis, control, and prototyping.
rodel.hanyang.ac.kr
기본적으로 내가 연구하고 싶어 하는 'Novel locomotion'을 보여주는 로봇을 여기서 많이 봤다.

https://www.youtube.com/watch?v=WB_fwPuLftE
가장 먼저 본 것은 WAVE(S)라는 로봇으로 평지 이동과 더불어 계단을 극복하기 위한 4절 기구를 추가한 것이 특징인 로봇이었다.
계단 극복과 관련해서는 많은 메커니즘을 봤었지만 이런 방식의 메커니즘은 또 처음이었다.
현장에는 WAVES를 들고 오셨는데 WAVE의 후속 모델로 기존의 WAVE가 링크에 파여있는 홈 부분이 계단 모서리에 걸려서 로봇을 들 수 있는 방식이었다면 WAVES는 해당 부분에 홈 대신 탄성 재질의 면을 부착해서 모서리와 닿는 부분이 살짝 들어가 고정되고 또 마찰력도 발생시키는 방식이었다.
홈의 위치가 고정되어 있어 계단의 형상(깊이, 높이)의 제약을 비교적 많이 받는 WAVES와 달리 바닥 모든 부분에서 모서리에 고정이 가능한 WAVES는 더 다양한 형상의 계단을 극복이 가능하다고 했다.
WAVES에서 특히 인상 깊었던 부분은 탄성체 부분의 형상을 그냥 적당한 모양으로 만든 게 아닌 계단 모서리와 닿을 확률이 높은 부분은 단위 길이당 기둥?을 더 적게 배치하고, 확률이 낮은 부분은 더 촘촘하게 배치했다는 것이었다. 연구실 수준에서는 당연한 것일 수도 있겠지만 나는 개인적으로 세세한 부분까지 고려해서 설계한 것을 볼 때가 가장 재밌다고 느낀다.


다음으로 설명을 들은 로봇은 Step이라는 로봇으로 2자유도의 바퀴를 가진 로봇이었다.
바퀴의 rim부분을 7bar-linkage + parallel link 구조를 이용해 3개로 분리할 수 있는 형태로 설명에 따르면 계단 극복도 가능하다고 했다.
이전에 내가 DGIST 인턴 때 만들었던 CRR(Cylindrical Rolling Robot)과 공통점이 많으면서도 linkage mechanism을 사용한 것과 자체가 로봇이 아닌 바퀴라는 부분에서 차이점이 있었다.
이외에도 tracker + rocker-bogie 구조의 tracker-bogie의 프로토 타입과, 회전스크류를 이용해 모래사장 등에서도 이동이 가능한 로봇이 SCREW에 대한 설명을 들었다.

RoDEL은 전부터 재밌는 로봇을 많이 만들어서 몇 번 들어봤었는데 실제 작품을 직접 보니 더 흥미로웠고 추후에 어떤 재밌는 이동방식의 로봇을 만들지 기대가 되었다.
●한국전자기술원(KETI)


마지막으로 기억에 남았던 건 KETI의 Teleop robot hand였다.
내가 로봇핸드에 큰 관심이 있는 것은 아니었음에도 기억에 남았던 이유는 해당 로봇 제어에 ROS를 사용하고 계시던 것과 손가락 구현에 tendon 방식을 사용한 게 아닌 소형 서보모터를 마디마다 사용한 것 때문이었다.
안타깝게도 내가 갔을 때는 calibration을 하고 계셔서 작동을 보지는 못했다....
●iRROBOT - MIGHTYZAP


*정신없어서 영상과 사진 찍는 것을 까먹었다.. 그래서 팜플랫이라도 올린다....
이 부스는 소형 리니어 액추에이터를 소개하는 곳이었다.
이전부터 여러 개의 소형 리니어 액추에이터가 들어가는 독특한 이동형 로봇을 생각 중이었는데 마침 딱 적당한 크기의 리니어 액추에이터를 보여주는 부스가 있어서 구경했었다.
국내에 이런 제품이 있다는 것을 알았으니 추후 내 로봇에 적합할지(힘, 속도) 검토해 봐야겠다.
위에 기록한 부스 이외에도 Hitec 서보, 현대 WIA, ETRI(한국전자통신연구원)의 부스를 포함한 여러 부스를 구경했었다.
바쁜 탓에 이번 박람회는 오래 있진 못했지만 그럼에도 현재 로봇 업계의 동향과 추후 내 프로젝트에 적용할만한 기술, 재료 등을 한번 파악할 수 있었던 시간이었다.
========================================================================
정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다.
틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글에 남겨주시면 감사하겠습니다. : )
========================================================================
'공부 > 공학' 카테고리의 다른 글
| [후기] 2024 로보월드 관람 후기 (1) | 2024.10.25 |
|---|---|
| [동역학] 동역학 중요 내용/공식 정리 (0) | 2023.02.21 |
| [재료역학] 재료역학 1,2 노트 정리 (0) | 2023.02.09 |
| [후기] 2022 대한민국 과학기술대전 관람 후기 (1) | 2022.12.16 |
| [후기] 2022 발명특허대전(대한민국지식재산대전) 관람 후기 (0) | 2022.11.20 |



