몸통의 설계는 다리에 비하면 고려할 사항이 적었다.
+)진행방향을 x로, 좌측을 y로 설정했다.
'①motor0 4개+컨트롤러+배터리 등이 모두 장착되도록 충분한 공간 확보, ②앞뒤 다리의 y축 회전(joint1)이 서로 방해하지 않도록 앞뒤 폭 결정, ③좌우 다리의 x축 회전(joint0)이 서로 방해하지 않도록 좌우 폭 결정, ④다리를 포함한 무게 중심이 로봇의 중심에 오도록 치수 결정' 크게 이렇게 4개가 있었다.
위 4개를 고려하며 설계해야 했고 이에 나는 몸통을 총 3개의 부분으로 나누어 설계를 하는 것으로 정했다. : front_body + rear_body + controller

①몸통의 설계에서 가장 우선적으로 고려해야 하는 것은 장착되는 컨트롤러, 배터리 등의 크기였다.
원래 처음 계획할 때는 이전과 마찬가지로 로봇에는 아두이노를 사용하고 블루투스 rosserial로 노트북과 통신하게 하려고 했었다.
하지만 이는 rosserial의 한계(buffer의 크기가 작아 한번에 통신할 수 있는 topic의 크기가 매우 작다.)때문에 비효율적이고 많이 사용하지도 않는 구조였다.
그래서 라즈베리파이를 장착해 직접 pca9685(서보모터 컨트롤러)와 통신하는 방식을 시도하기로 했다.
지금까지 굳이 아두이노를 거쳐서 했던 이유는 라즈베리파이로 모터나 센서를 사용하는 법을 몰라서 그랬는데 이번 기회에 라즈베리파이도 입문을 해야겠다고 생각했다.
결론적으로 몸통에 라즈베리파이, 배터리가 올라갈 공간을 생각해서 몸통을 설계해야 했다.
우선 라즈베리파이로 바뀐 것을 적용한 schematic diagram을 확인할 필요가 있었다.
+)배터리는 갖고 있던 Li-Fe를 사용하기로 했다. 전압과 방전율 관련해서 이 배터리를 선정한 배경은 아래의 링크에 설명되어 있다. 다만 1450mAh로 용량이 낮은 게 마음에 걸린다. 이후 로봇의 작동시간이 너무 짧다고 판단되면 배터리를 바꾸는 것도 고려 중이긴 하다.(용량이 더 큰 LiFe-구하기 힘듦, 비쌈 or 용량이 큰 LiPo-비교적 쌈, 추가적인 dc-dc converter 필요)
16채널 PCA9685 PWM 서보모터 드라이버 모듈
<!-- ■ 상품상세페이지 구매후기 ============================================= --> 게시물이 없습니다 사용후기 전체보기 후기쓰기 상품 Q&A 게시물이 없습니다 상품Q&A 전체보기 문의하기
indifrog.co.kr
https://www.devicemart.co.kr/goods/view?no=1321141
XL4015 강하형 DC-DC 5A 가변 컨버터 [SZH-PWSD-009]
외장형 / 가변출력전압 / 가변방식 : 트리머 / 1ch 출력 / 강하형 50W 비절연 스위칭 컨버터 / 입력전압 : 4V~38V / 출력전압 : 1.25V~36V / 출력전류 : 4.5A / 변환효율 : 최대 96% / 스위칭 주파수 : 180kHz / 입
www.devicemart.co.kr
②, ③은 단순히 가동범위 간섭이 일어나지 않는 범위 중 최소의 길이로 결정하면 되는 문제로 생각하지 않고, 혹시 관련한 논문이나 가이드라인이 있나 찾아봤었다.
하지만 관련 내용을 찾지 못했다. (크게 고려할 부분이 아니라 없는건지, 못 찾은 건지 모르겠다...)
그래서 기존의 유명한 quadruped들을 토대로 '다리 길이와 body의 가로, 세로의 길이 비'를 측정해 참고했다. (Spot이나 Cheetah의 dimensions를 datasheet를 통해 찾으려고 했지만 없었다. 그래서 구글링으로 나온 사진들을 통해 원하는 비율을 직접 측정했다.)
④는 완벽하게 컨트롤 할 수 있는 부분이 아니라서 부품의 배치를 가능한 대칭이 되도록 배치하는 것으로 충족시켰다.

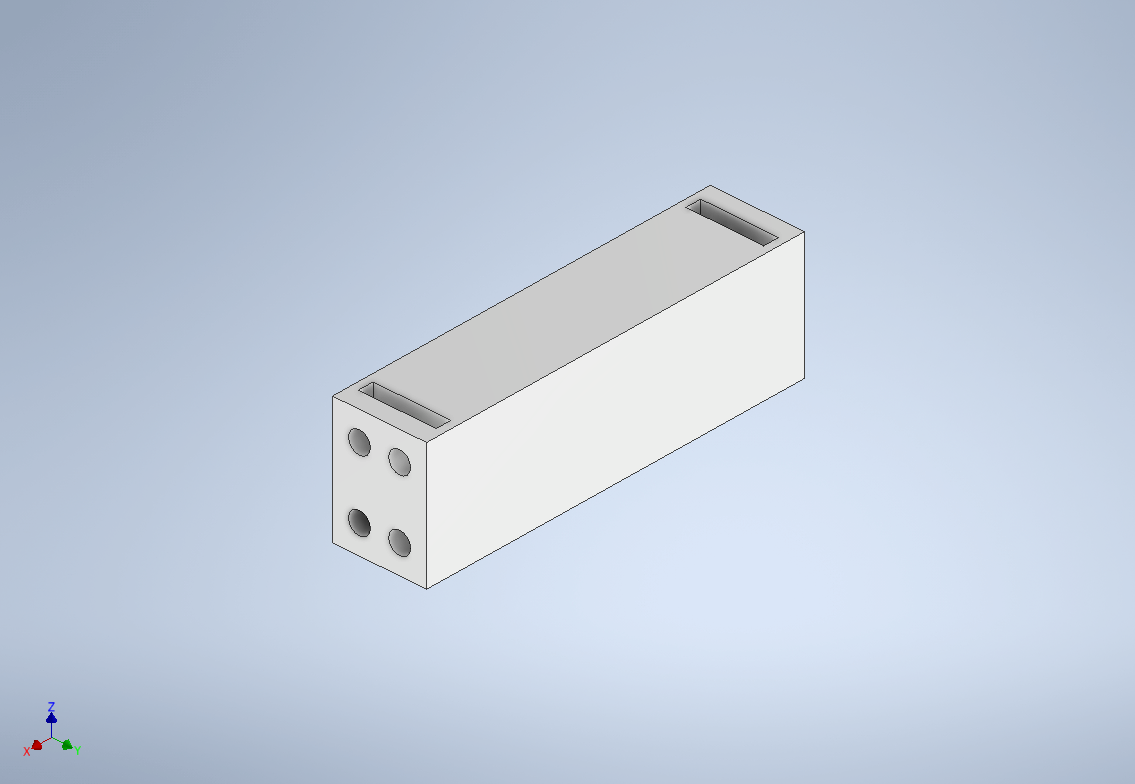
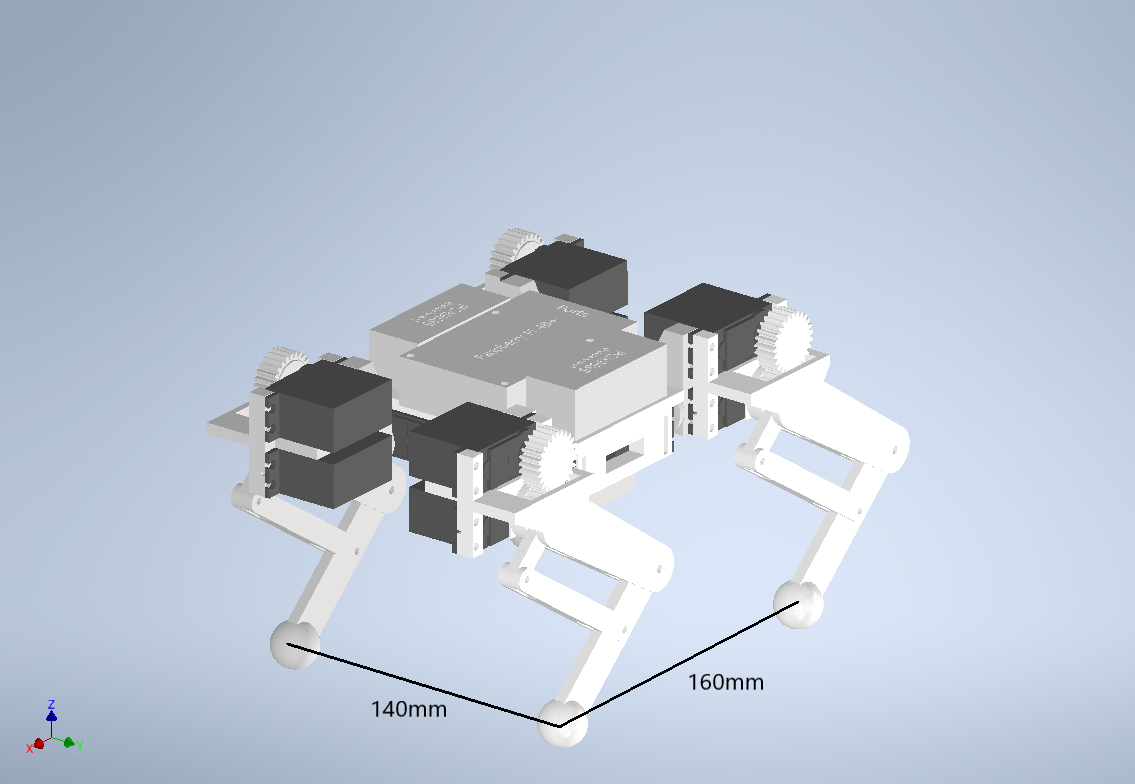



중앙에 들어갈 spine과 raspberry pi, pca9685가 올라갈 body_upper를 위와 같이 만들었다. 이때 tibia와 ground의 contact point가 위의 치수(160, 140)를 갖도록 spine과 body_upper를 설계했다.
160mm이라는 치수는 다른 quadruped의 body x축 길이가 femur의 약 2배인 것을 참고 했다. 다른 quadruped의 y축 길이는 femur보다 작은 경우가 많았는데 그렇게 하면 내 로봇의 설계에서는 x축 회전(joint0)이 좌우로 간섭이 발생하기에 이를 막으면서 가장 작은 치수인 140mm을 정했다.
추가로 가능한 부품 배치를 대칭으로 할려고 했지만 공간이 나지 않아서 비교적 가벼운(전체 무게 대비 무시가능한 수준)인 dc-dc converter를 로봇 오른쪽에 배치했다.
이후에 바로 실물을 만들지 않고 gazebo에서 시물레이션을 하는 것이 1차 목표이므로 몸통 설계는 이 정도만 했다. 추후 실물을 만들 때에는 고정을 위한 구멍과 배터리 장착 부분 등이 추가될 예정이다.
일단 이렇게 1차적인 prototype의 모델링을 완성했다. 이제 얘를 urdf로 만들어서 gazebo에 구현할 차례이다.
========================================================================
정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다.
틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글에 남겨주시면 감사하겠습니다. : )
========================================================================
'개인 프로젝트' 카테고리의 다른 글
| 2023-1 4족보행 로봇(Quadruped robot) 만들기 #8 (urdf 제작 및 rviz, gazebo 2) (4) | 2023.04.10 |
|---|---|
| 2023-1 4족보행 로봇(Quadruped robot) 만들기 #7 (urdf 제작 및 rviz, gazebo 1) (0) | 2023.04.09 |
| 2023-1 4족보행 로봇(Quadruped robot) 만들기 #5 (다리 설계 3) (0) | 2023.03.09 |
| 2023-1 4족보행 로봇(Quadruped robot) 만들기 #4 (다리 설계 2) (0) | 2023.02.27 |
| 2023-1 4족보행 로봇(Quadruped robot) 만들기 #3 (다리 설계 1) (2) | 2023.02.17 |



