②실물 모델링(for 3d 프린팅)은 ①과정의 모델링을 기반으로 실제 프린팅에 맞게 모델을 수정했다.
②때 주로 고려하는 것은 채결을 위한 구멍, 볼트 머리/길이의 고려, 기성 부품의 치수 오차, 출력물의 치수 오차, 출력물의 출력 방향에 따른 강도의 이방성 등을 고려한다.
+)기본적으로 볼트는 m3볼트를 사용했고 단순 체결을 위한 볼트 구멍은 3.5mm로 뚫었다.
femur
●femur_link를 결합하기 위해 femur를 2개로 나눴다.(위 사진 기준 xz평면으로 갈라짐) 이를 위해 중앙에 구멍을 뚫어 볼트-너트로 femur를 결합할 수 있도록 했다. 이때 볼트머리와 너트가 femur 표면에 튀어나오지 않도록 counterbore 6.3mm를 주어 안쪽으로 묻히게 했다.
●첫 모델링 때는 두 볼트 구멍의 간격이 더 좁았지만 출력해보니 기어 부분에 힘이 가해지면서 가운데 부분이 살짝 벌어지는 문제가 발생해 볼트 간격을 더 넓혔다.
●개발 단계에선 기어 구동시 가동 범위를 벗어나는 일이 잦은데 이 때 양쪽 끝이 막혀 있으면 기어와 모터에 심한 응력이 가해지고 심하면 파손까지 일어날 수 있다. 때문에 실제 필요한 기어 이상으로 femur에 빈 공간을 주었다.
●motor_cover와 결합하는 cylinder부분, femur_link와 결합하는 구멍 부분, tibia와 결합하는 부분의 치수를 조금씩 넓혔다.
motor cover
●우선 프린팅을 위해 motor_cover와 모터 사이에 들어가는 motor_plate를 분리했다.
●피치원 지름(PCD)이 25mm인 기어를 사용하기에 처음에는 모터 중심축 사이의 거리를 25mm 그대로 사용했지만 그렇게 하니 출력물의 오차 때문인지 너무 꽉 물리고 이 때문에 femur가 아래로 휘었다. 그래서 중심축 사이의 거리를 25.8mm로 살짝 넓혔다.
●모터가 장착되는 부분의 치수를 살짝 넓혔다.
gear
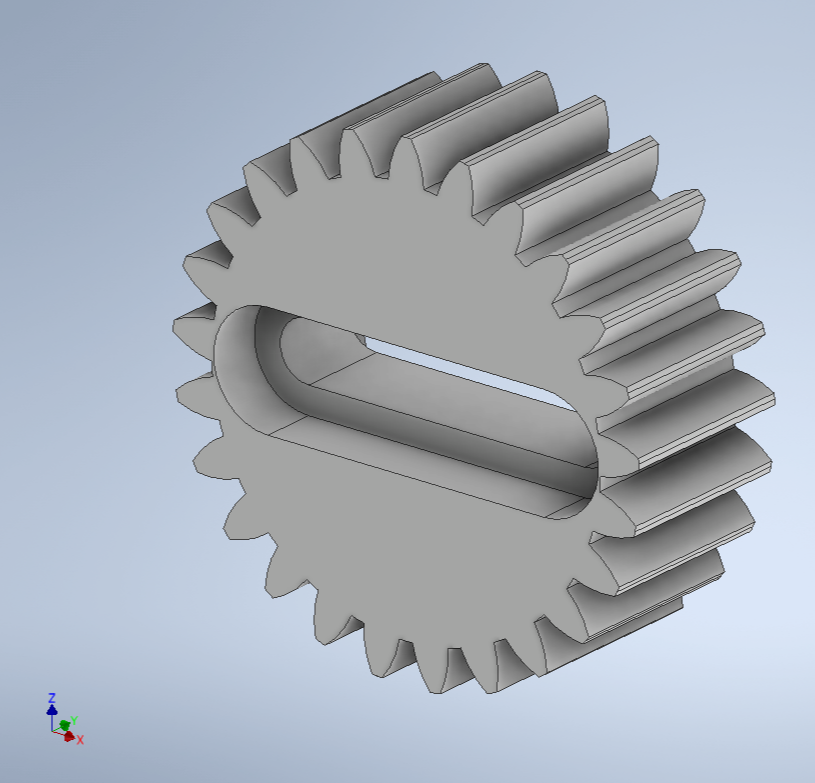
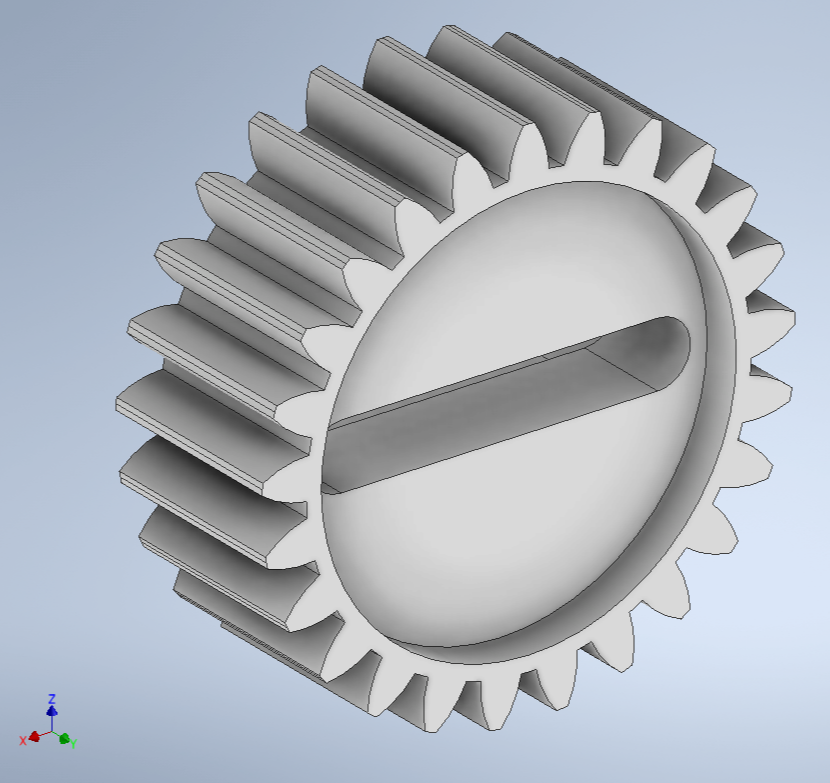
●기어는 mg996r 패키지에 있는 원형 혼(horn)을 사용하기 위해 홈과 볼트 구멍을 뚫었다. femur와 마찬가지로 너트가 기어 밖으로 나가지 않게 하기 위해 counterbore 6.3mm를 넣었다.

+)모터나 모터 혼 datasheet에 있는 24T, 25T 등은 모터의 잇수(teeth)를 말한다고 한다. 같은 T의 모터와 혼을 사용해야 한다. 그래서 갖고 있는 hs-311(24T)의 혼은 mg996r에 못 사용한다.
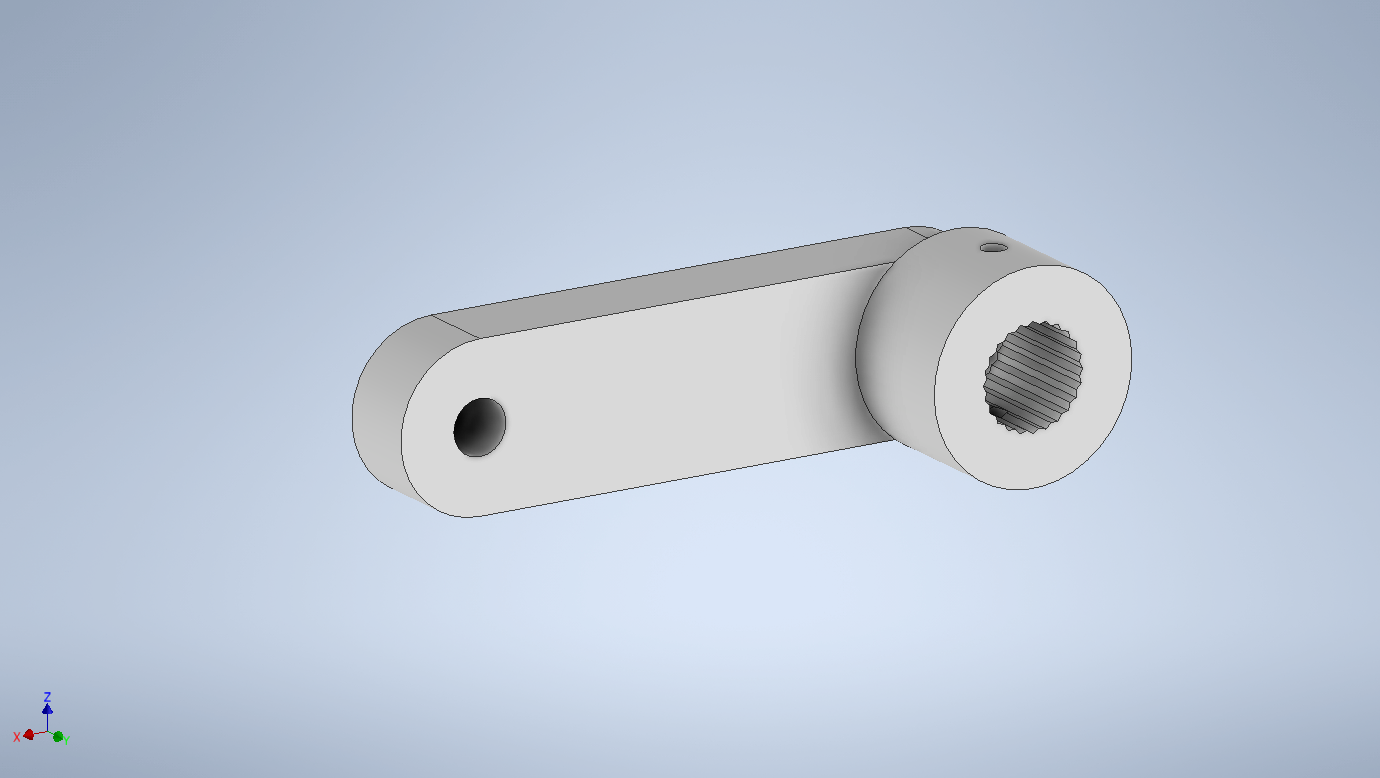
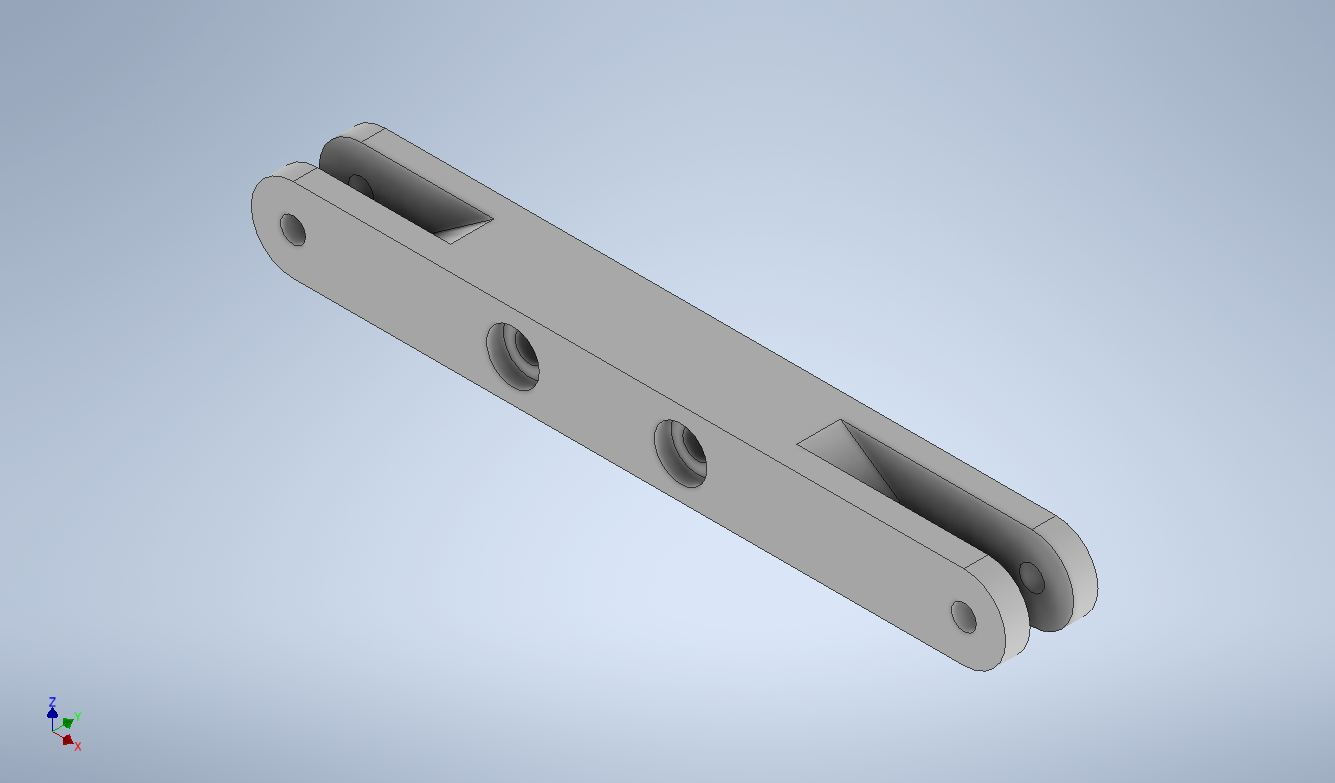
femur link
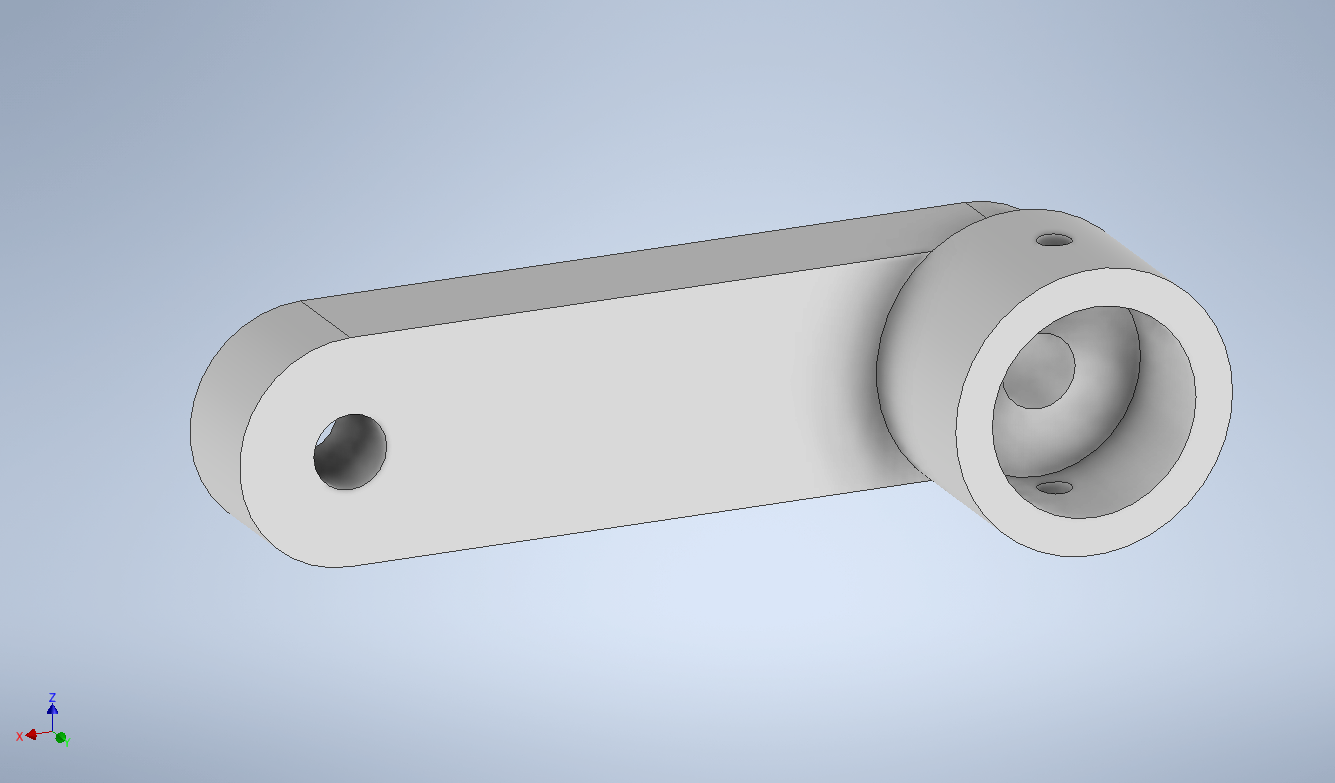
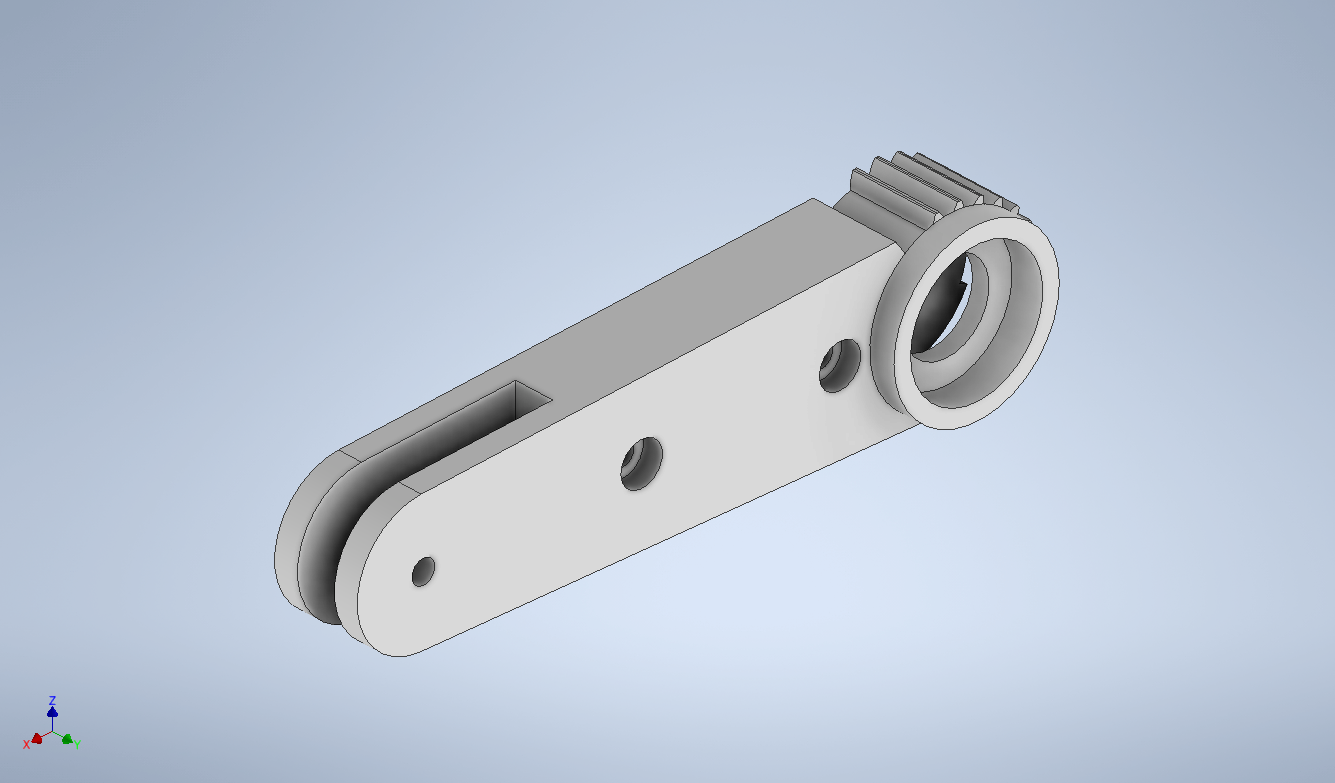
●①과정에선 femur가 가장 어려웠다면 ②과정에선 femur_link가 가장 어려웠고 여러 시도를 했었다. 문제가 되었던 부분은 모터와 결합하는 부분이었다. 원래는 아래 사진과 같이 출력물 자체에 이(teeth)를 넣어 바로 모터에 장착이 가능하도록 했었다.
●좌측이 가장 먼저 시도 했던 모델로 특이사항은 모터와 연결되는 cylinder부분에 torsional load가 많이 가해질 것이기 때문에 프린팅 방향을 xy평면이 바닥에 오도록 설정했었다. (∵FFF방식의 출력물은 출력방향의 load(axial, torsional)에 약하다.
●추가로 출력물의 layer들 사이의 접합을 더 견고하게 하기 위해 후처리로 열을 가해줬다. 라이터로 표면이 변형되지 않는 선에서 약간의 압력을 주며 구웠다.
●좌측 모델의 경우 위의 과정을 거쳤음에도 작동과정에서 cylinder부분이 출력방향으로 벌어지는(지름 방향) 문제가 발생했고 이에 cylinder의 지름을 더 두껍게 한 것이 우측의 모델이다.
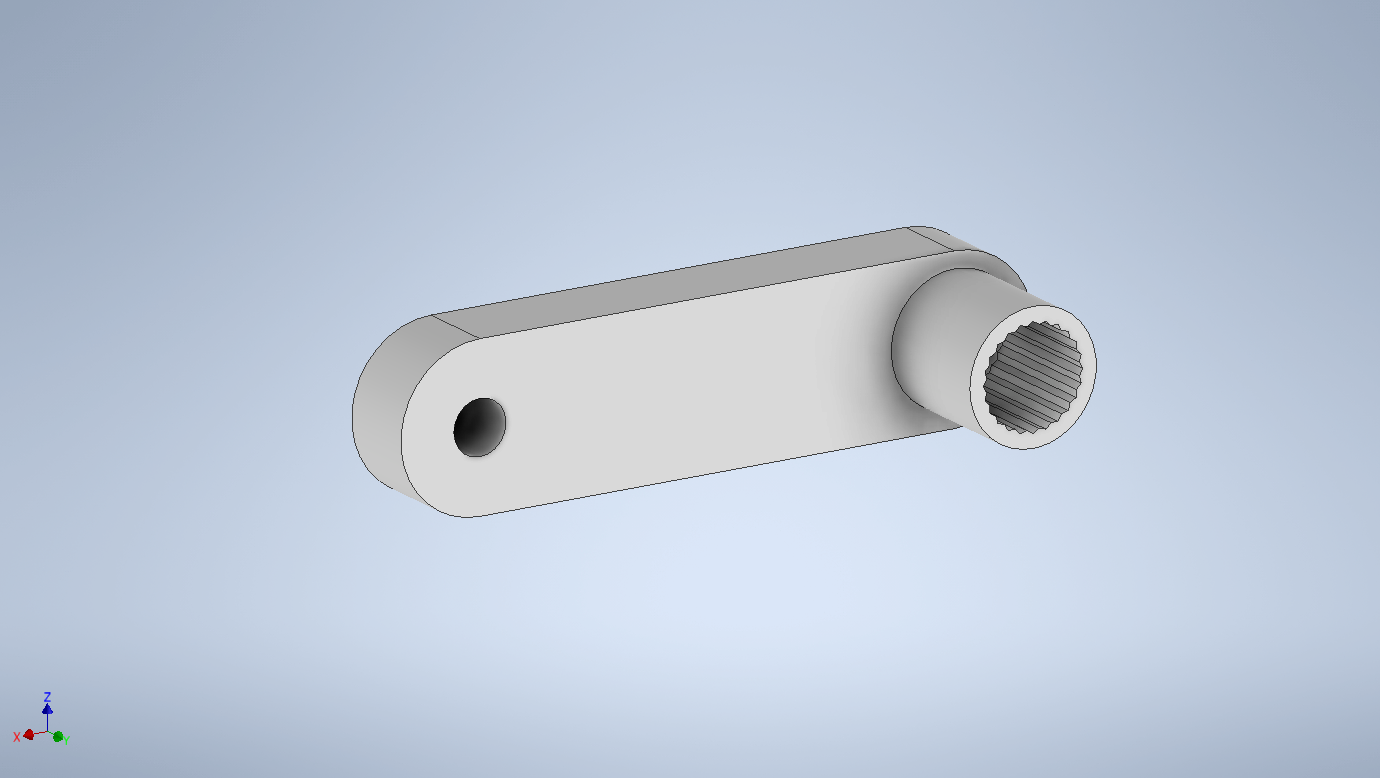
●우측모델은 좌측모델 처럼 cylinder가 파손되는 문제는 발생하지 않았다. 하지만 내부의 teeth들이 작동과정에서 마모되어 좀만 사용하면 동력전달이 되지 않는 문제가 발생했다. 이를 해결하기 위해 teeth의 치수도 바꿔보고 열도 가해봤지만 teeth같이 작은 크기에는 pla출력물이 강도 측면에서 적합하지 않다는 결론을 내렸다.

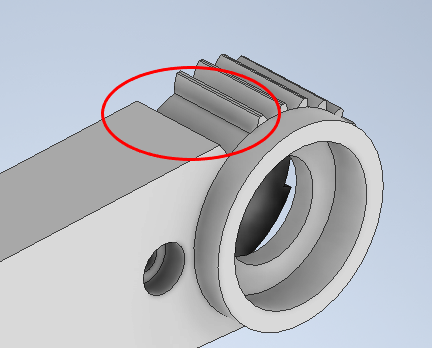
●이에 내가 생각한 방법은 mg996r패키지로 같이 제공되는 horn의 일부분을 사용하는 것이었다. 위 사진의 빨간 원 부분만을 잘라내어 femur_link부분에 끼우고 순간접착제와 매우 얇은 볼트로 고정시키는 방법을 생각했다.
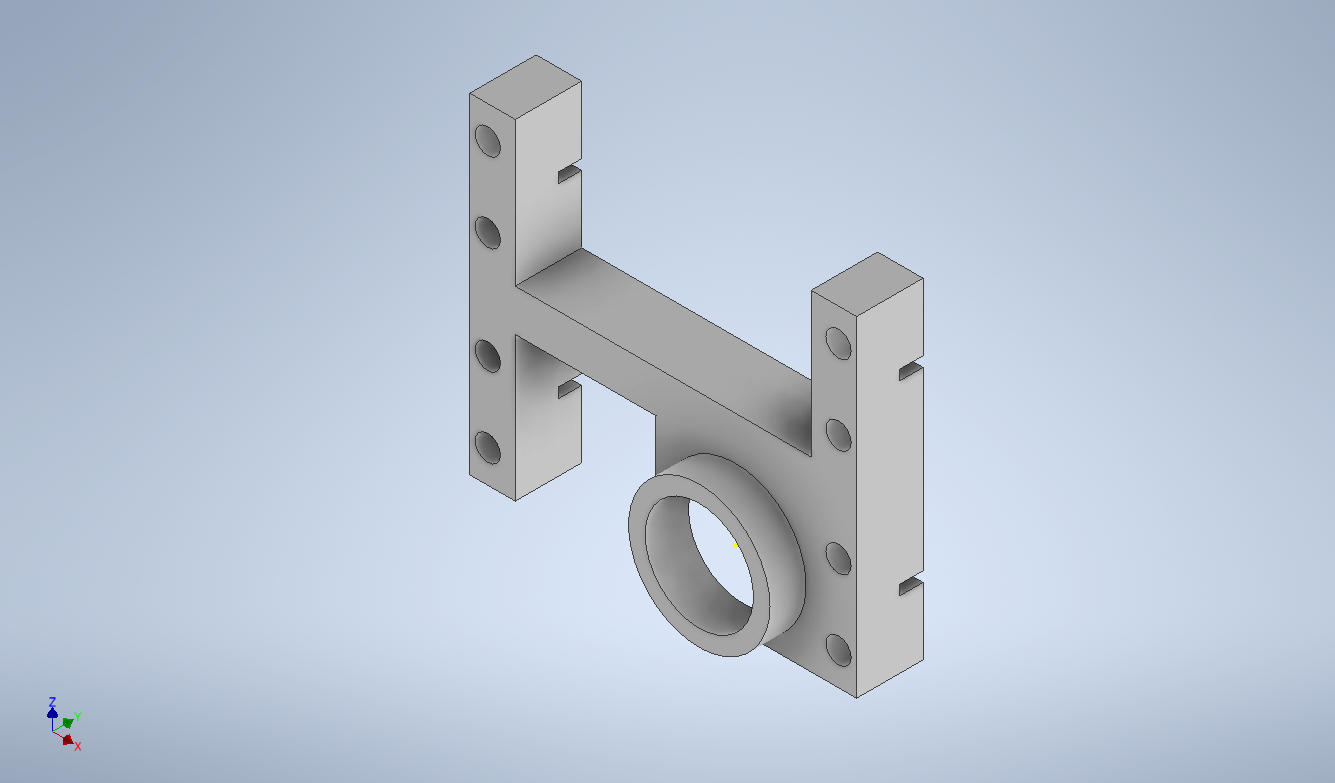
femur jig

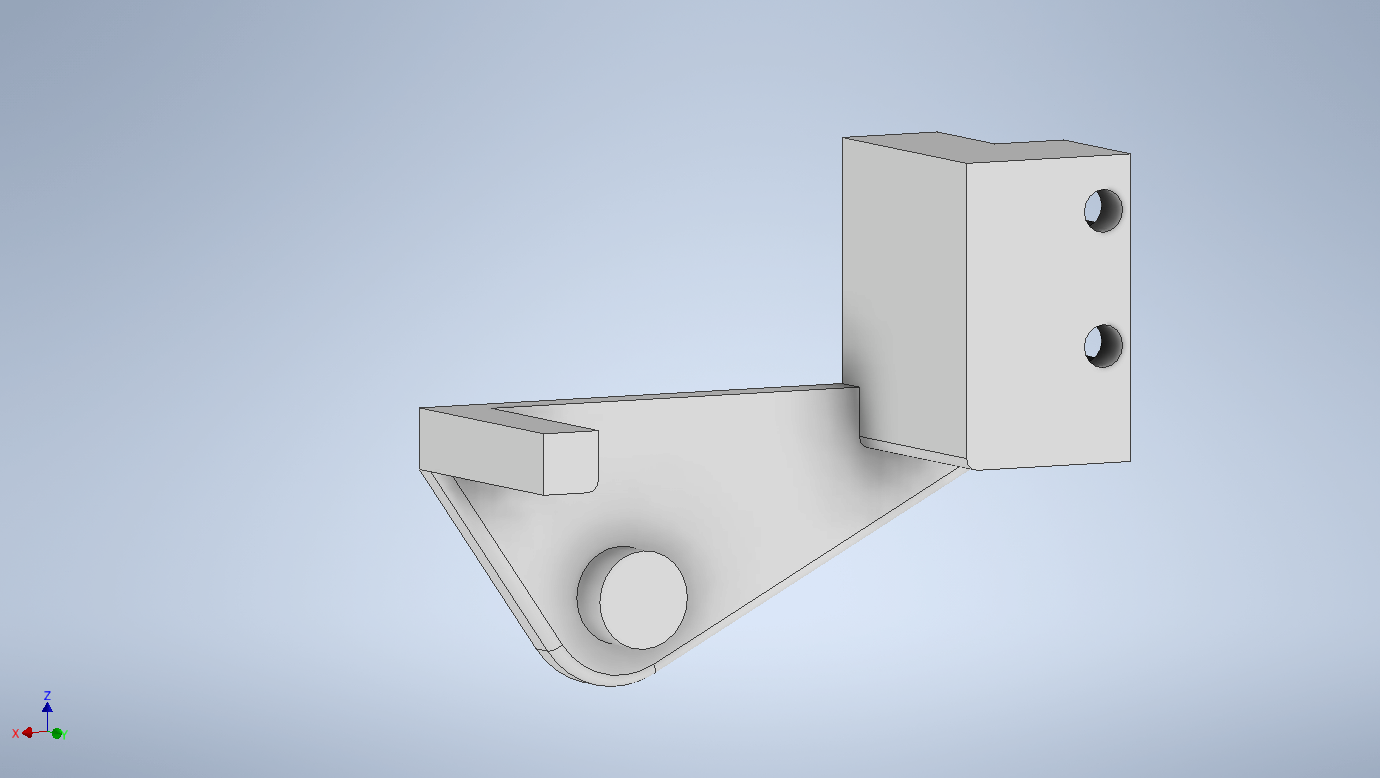
●jig는 femur가 축에 수직 한 방향으로 움직이는 것을 막아주면서 축방향으로 빠지는 것을 막기 위해 장착되었고 이를 위해 motor_cover에 강하게 고정될 필요가 있었다. 따라서 motor1이 체결되는 부분과 같이 체결되도록 했고 이때 jig자체가 부러지는 것을 막기 위해 두껍게 extrude를 했다.
tibia
●tibia의 모델링은 변경점 없이 ①의 것을 사용했다.
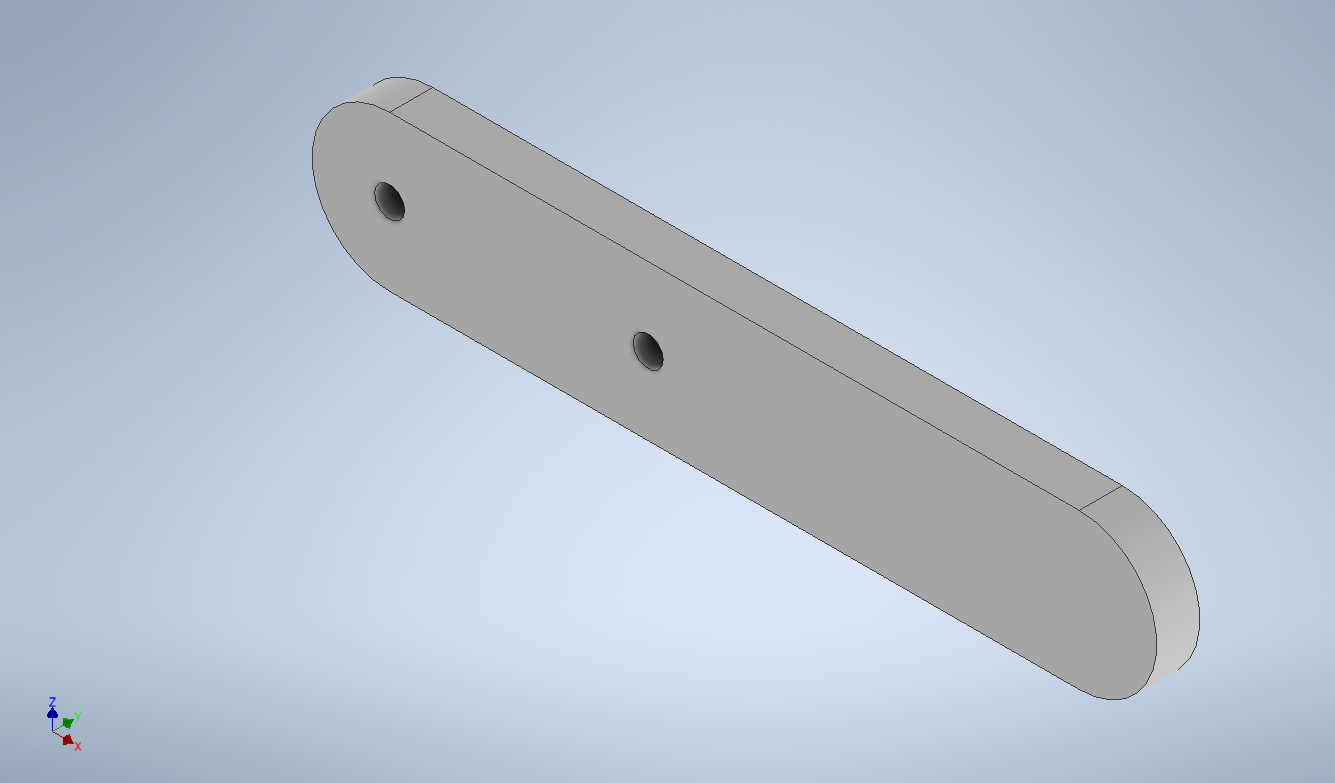
tibia link
●tibia_link는 지금 이 상태로도 femur_link, tibia와 체결하는 데에는 문제가 없지만 최대한 서포트를 만들기 싫어 역시 xz평면으로 자른 후 2개로 나눠 출력했다. 때문에 femur와 마찬가지로 볼트구멍을 만들고 또 counterbore도 같은 치수로 넣어줬다.
위에 기록한 고려, 수정 사항은 완성한 이후에 정리한 것이고 실제로는 엄청 많은 trial-error가 있었다.
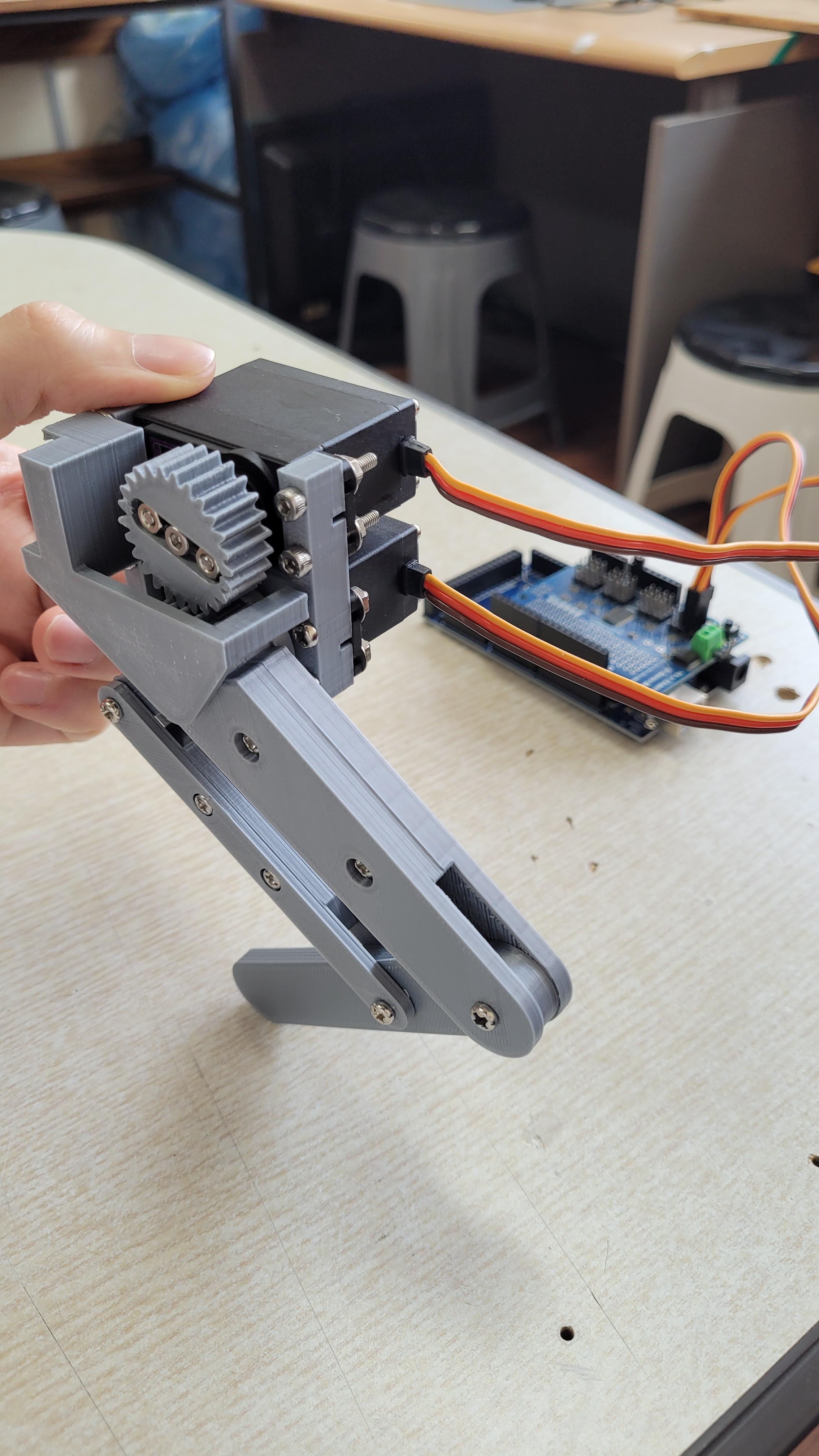
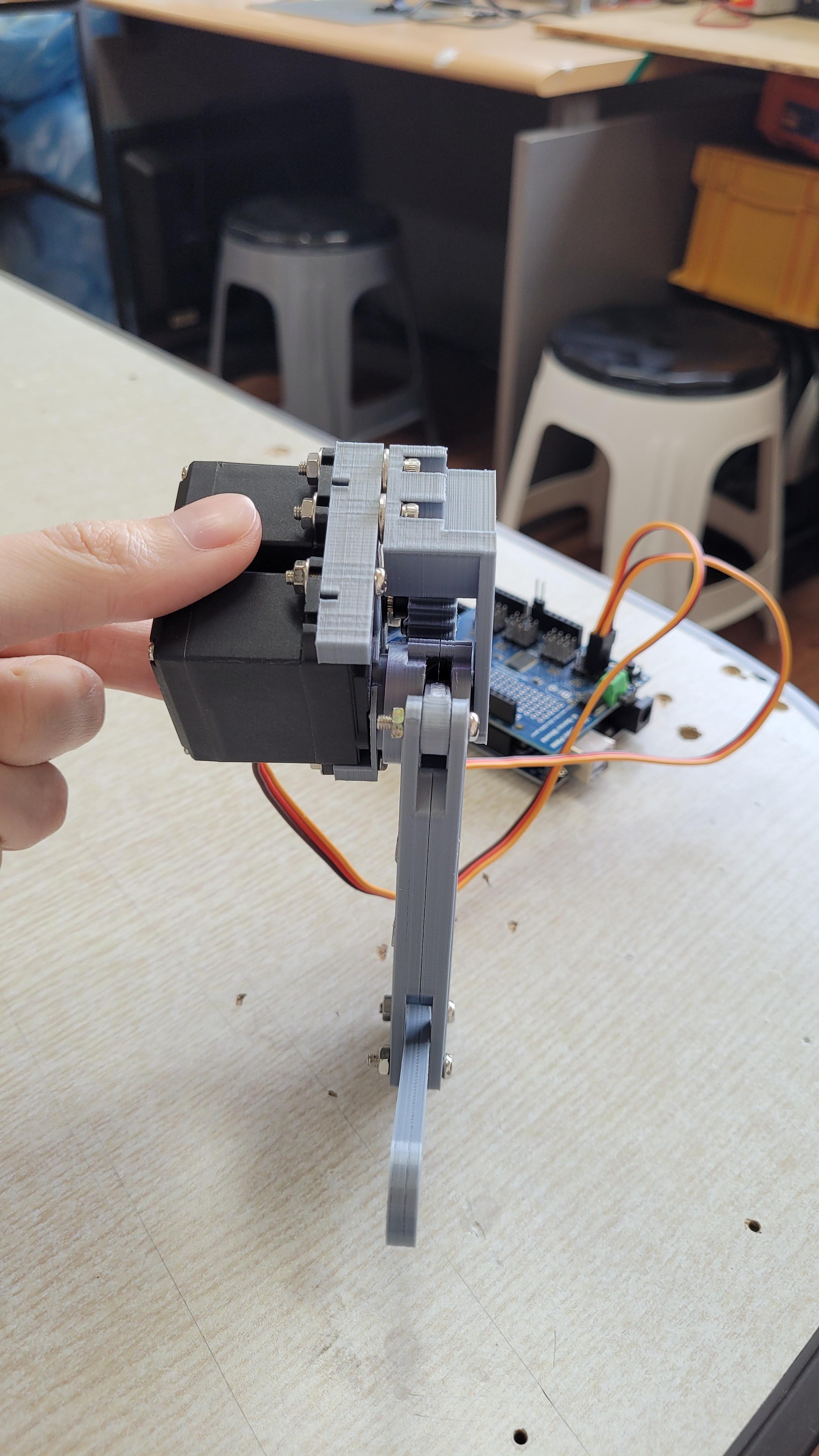
만들면서 계속 테스트 했던 것은 부드럽게 움직이는 지와 충분히 몸을 들 수 있는지였다.
결과물은 아주 만족스러웠다.
다만 모터 자체의, femur의 gear가 갖고 있는 백래쉬(backlash)로 인해 상하운동이 10mm 정도 흔들렸다.(맞는 표현인지 모르겠다.) 그래도 일단은 큰 문제를 일으킬 것으로 보이지는 않는다. 다만 추후 제어할 때 이런 특성이 있다는 것은 고려를 해야 할 것으로 보인다.
이렇게 다리의 prototype을 만들었고 이제 몸통의 설계를 시작할 차례다.
========================================================================
정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다.
틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글에 남겨주시면 감사하겠습니다. : )
========================================================================
'개인 프로젝트' 카테고리의 다른 글
| 2023-1 4족보행 로봇(Quadruped robot) 만들기 #7 (urdf 제작 및 rviz, gazebo 1) (0) | 2023.04.09 |
|---|---|
| 2023-1 4족보행 로봇(Quadruped robot) 만들기 #6 (몸통 설계, Prototype 모델링 완성) (0) | 2023.03.22 |
| 2023-1 4족보행 로봇(Quadruped robot) 만들기 #4 (다리 설계 2) (0) | 2023.02.27 |
| 2023-1 4족보행 로봇(Quadruped robot) 만들기 #3 (다리 설계 1) (2) | 2023.02.17 |
| 2023-1 4족보행 로봇(Quadruped robot) 만들기 #2 (paper study) (1) | 2023.01.23 |



