[Locomotion] 자유도와 안정성을 높인 wheg 로봇, OmniWheg: An Omnidirectional Wheel-Leg Transformable Robot
Articles/References
+)상단 이미지 클릭 시 유튜브로 연결
https://youtu.be/pCAHxhy_seQ
https://arxiv.org/abs/2203.02118
OmniWheg: An Omnidirectional Wheel-Leg Transformable Robot
This paper presents the design, analysis, and performance evaluation of an omnidirectional transformable wheel-leg robot called OmniWheg. We design a novel mechanism consisting of a separable omni-wheel and 4-bar linkages, allowing the robot to transform b
arxiv.org
http://m.irobotnews.com/news/articleView.html?idxno=30276
美 WPI, 전방향 이동 가능한 '바퀴-다리' 변신 로봇 개발
미국 우스터폴리테크닉대학(WPI:Worcester Polytechnic Institute) 연구팀이 주변 환경에 맞춰 바퀴 달린 로봇에서 다리 달린 로봇으로 변신 가능한 로봇 시스템인 ‘옴니웨그'(OmniWheg)를 개발했다고 테크
m.irobotnews.com
+)
1. wheg는 wheel + leg의 합성어로 가장 큰 특징은 바퀴의 rim이 연속적이지 않다는 것이다. 다양한 형태의 다리들이 원형으로 배치되어 있거나 아예 다리 하나가 회전하는 형태로 되어 있다. 때문에 평지의 빠르고 안정적인 주행보다는 장애물을 넘어가는 것에 목적이 있는 것으로 보인다. (새로운 구조라서보다 이런 형태의 이름을 처음 알아서 따로 적어봤다.)

2. rim에 다른 방향으로 작은 바퀴가 붙어있는 형태의 바퀴는 omni wheel과 mecanum wheel이 있다. 둘 다 한 방향으로만 이동이 가능한 바퀴의 단점을 보완하기 위해 만들어졌다. 메인 바퀴와 작은 바퀴가 이루는 각도에 따라 나누는데 90º면 omni wheel, 45º면 mecanum wheel로 부른다.
https://www.robotdigg.com/news/114/Omni-wheel-vs-mecanum-wheel
Omni wheel vs mecanum wheel - RobotDigg
What is the difference of Omni Wheels n Mecanum Wheels? Let's see what the internet is telling us
www.robotdigg.com
일반적인 4륜구조(ex 자동차)의 바퀴 배치에서 onmiwheel은 작은 바퀴에 동력이 전달되지 않는 이상(혹은 측면으로 미는 힘이 없는 이상)좌우 평행이동이 불가하다. 대신 mecanum wheel보다 측면이동에 있어서 에너지 효율적이다.
반면 mecanum wheel은 네 바퀴의 상대적인 회전 방향에 따라 작은 바퀴의 동력 전달 없이(외력 없이)좌우, 대각 이동이 가능하다.
https://www.servomagazine.com/magazine/article/get-rolling-with-omni-directional-wheels
Get Rolling with Omni-Directional Wheels
Why not implement omni-directional wheels in your next build?
www.servomagazine.com
(마찬가지로 새로운 구조라서보다 이름을 처음 알아서 따로 적어봤다.)
Summary
장점/특징:
1. 4륜 자동차의 구조를 하고 있고 각 바퀴는 mecanum wheel구조를 사용했다.
2. wheel mode에선 전진, 후진, 좌우회전과 더불어 mecanum wheel을 사용했기에 좌우/대각 평행 이동이 가능하다.
3. 각 바퀴에 장착된 서보모터로 4개의 leg를 펼칠 수 있다(wheg구조). 각 leg들은 각각 4절 링크로 되어 있다. (논문 Fig. 2.)
4. leg를 펼쳐서 장애물을 타고 넘어갈 수 있다. 실험 결과 전진으로는 26cm까지, 후진으로는 24cm까지의 장애물을 넘어갔다고 한다.
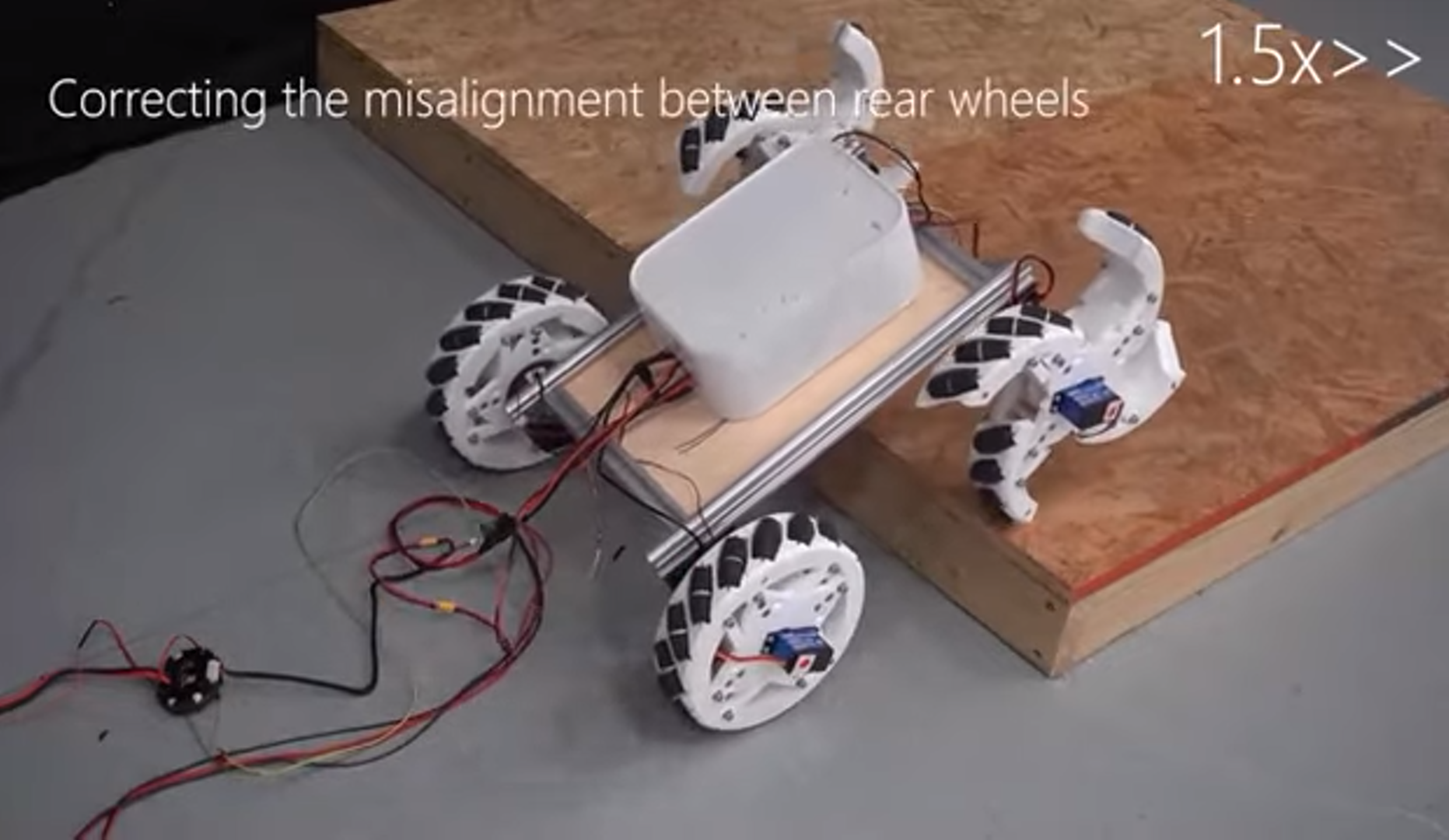
5. 장애물을 올라가기 전에 '장애물과의 평행 거리를 유지하면서' 좌우 leg가 펼쳤을 때 같은 위치에 오도록 정렬(wheel alignment)할 수 있다. 이는 좌우 평형이동을 통해서 조절하는 것으로 이를 통해 장애물을 올라갈 때의 안정성을 더해주는 것으로 생각된다. 이 부분이 이 로봇의 핵심인 것 같다.
+)(내 생각)기본적으로 장애물을 올라가는 것은 장애물과 바퀴 축이 평행한 상태라는 것을 가정하고 있는 것 같다. 평행 상태라도 wheg의 정렬이 되지 않은 상태로 장애물에 올라가면 mecanum wheel의 작은 바퀴 방향으로 미끄러질 위험이 있다. 반면 정렬을 통해 좌우 leg가 동시에 올라가면 서로 좌우 방향의 힘을 상쇄하기에 미끄러지지 않는다.
++)이를테면 왼쪽 leg의 mecanum wheel은 축이 좌측 45º로 되어 있고, 오른쪽은 반대로 우측 45º로 되어 있다고 해보자. 좌측 바퀴만 장애물에 올라가면 좌측+뒤로 밀리고, 우측 바퀴만 올라가면 우측+뒤로 밀릴 것이다. 하지만 동시에 올라가면 좌측, 우측으로 밀리는 성분은 서로 상쇄될 것이다. (뒤로 밀리는 성분은 바퀴의 동력으로 극복한다.)

응용/개선:
1. (내 생각) 지금과 같은 기능을 유지한다는 조건하에서는 서보모터의 갯수를 전륜 1개, 후륜 1개로 줄이는 것이 더 효율적일 것 같다. 어차피 바퀴가 펼쳐지는 상황은 전륜이 동시에, 혹은 후륜이 동시에 펴지는 경우 밖에 없기 때문이다. 이렇게 하면 무게를 줄여 더 쉽게 장애물을 넘을 수 있을 것으로 생각된다.
2. (내 생각) 일단 논문 상으로는 leg가 펼쳐지는 것은 0% 아니면 100% 밖에 없는 것 같다. 하지만 일부만 펼칠 수도 있게 하면 완벽한 원은 아니지만 바퀴의 지름을 조절할 수 있는 구조로써 사용할 수 도 있을 것 같다.
3. (내 생각) 올라가는 동작에서 앞쪽의 leg를 접어 당기거나, 뒷쪽의 leg를 미리 펼쳐 밀어주는 방식의 제어도 생각해 볼 수 있을 것 같다.
4. 논문에서 언급한대로 실내 탐색용 로봇으로는 상당히 유용할 것 같다.
========================================================================
정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다.
틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글에 남겨주시면 감사하겠습니다. : )
========================================================================