2021-1 이족보행 로봇 제작 프로젝트 #6 (골반, 상체 설계2)
지난번 만든 골반 테스트 프레임을 바탕으로 골반 프레임의 틀을 만들었다.
골반 프레임 설계는 잠시 여기서 멈추고 아두이노와 배터리가 올라갈 등판과 가슴판을 설계를 시작했다.
그래야 나중에 골반 프레임에 합치기도 편하고 골반 프레임을 불가피하게 수정할 상황도 대처가 가능할거라고 생각했다.
아두이노의 도면을 가져와 구멍과 기판의 크기를 확인하자

혹시 몰라서 아두이노 실물의 치수를 몇 개 측정해봤는데 다행이 일치했다.
우선 대충 보드와 배터리의 위치를 잡아보자
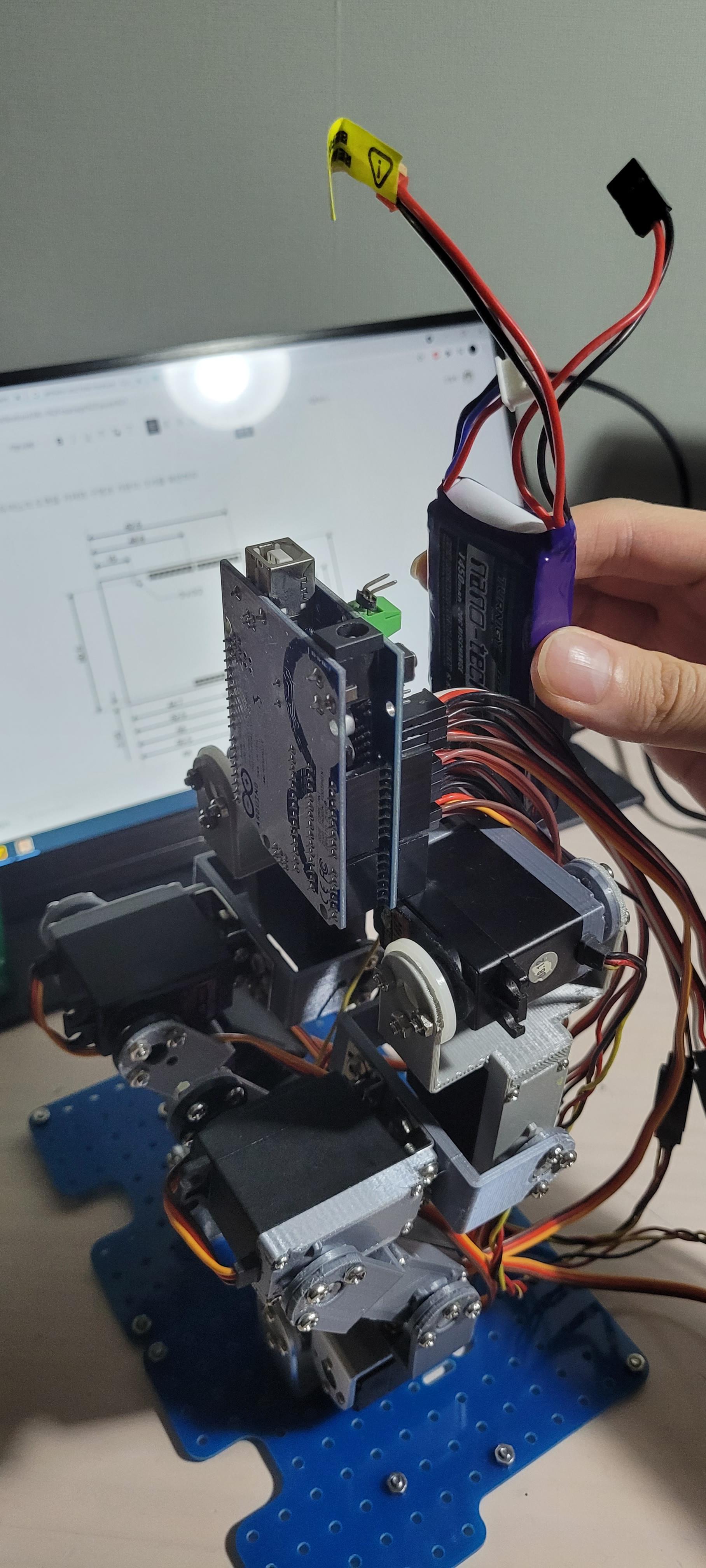
사실 서보 모터의 선과 배터리잭, usb 때문에 이 배치말고는 선택권이 없었다.
이를 바탕으로 앞,뒤판, 배터리, 아두이노, 골반의 배치도를 간단하게 그렸다.

+) 검은색 실선은 앞, 뒤판, 빨간색은 골반 앞쪽의 고정 부품이다.
대충의 정한 수치라 실제 모델링 할때는 대부분의 수치가 수정되었다.
-앞, 뒤판 간격 60 → 55
-앞, 뒤판 넓이 60X70 → 65X75
-앞, 뒤판 두께 3T 4T → 2T 3T
-등등
물론 얘도 실물을 출력하고 마음에 안들면 다시 바꿀 것이다.
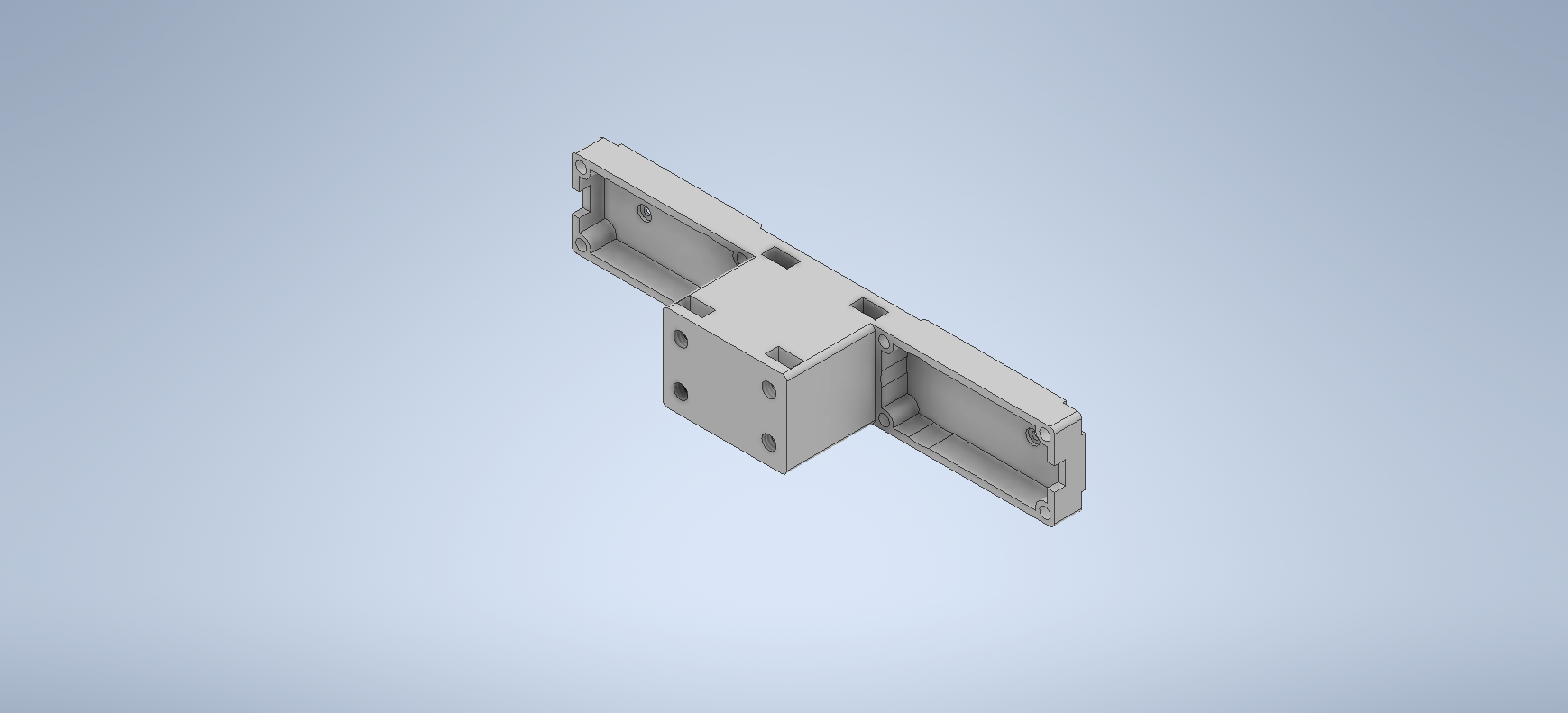
며칠간 계속 길이 측정, 생각, 설계해서 만든 게 다음의 부품들이다.
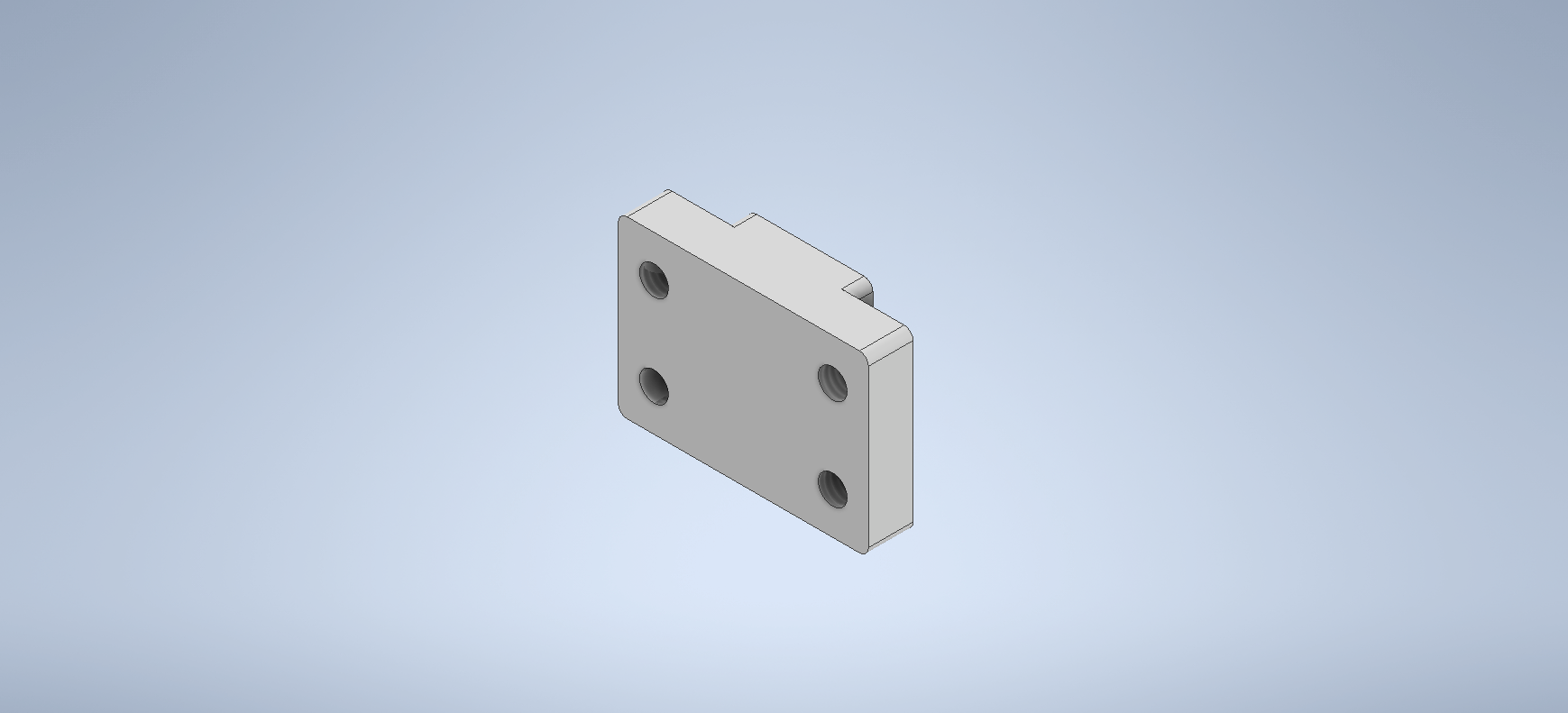

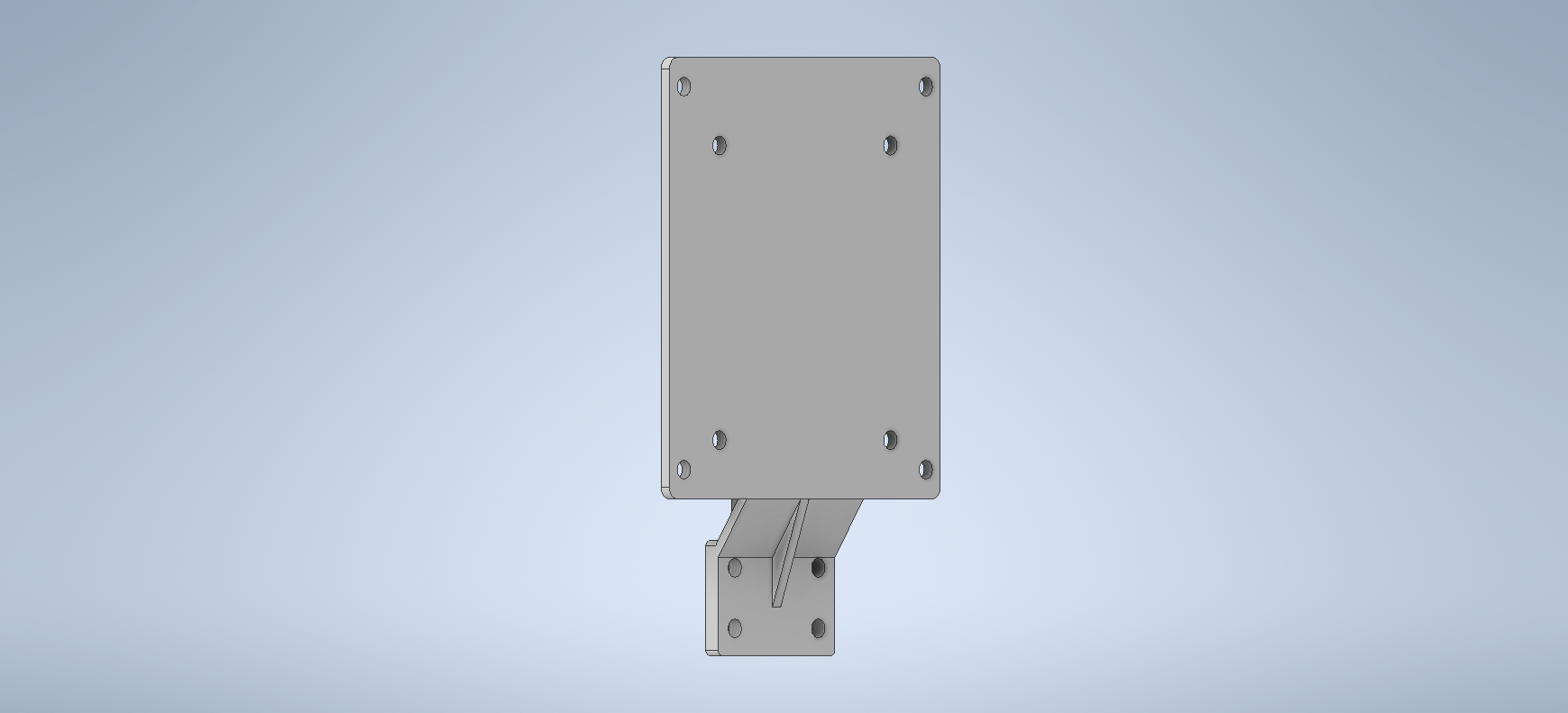
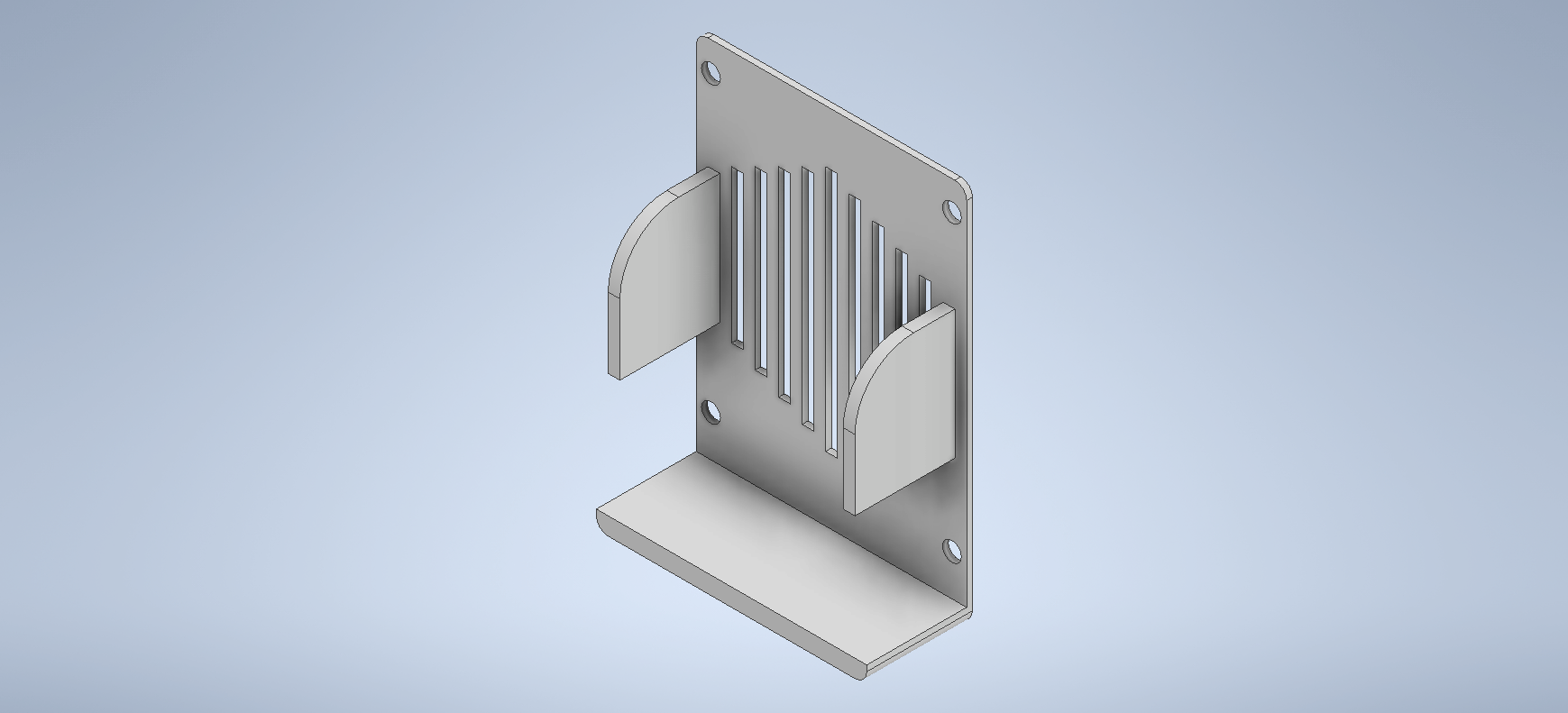
원래는 인벤터에서 assembly를 거의 사용하지 않았는데 확실히 정확한 치수 확인이 필요한 부품을 설계할 때는 편한거 같다.
일단은 내가 원하는 거 이상으로 모델링이 잘 나왔다.
물론 뽑아서 직접 조립해봐야 알 수 있겠지만 일단은 정말 만족스럽다.
뽑자.
===============================================================================
정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다.
틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글에 남겨주시면 감사하겠습니다. : )
===============================================================================