2021-1 이족보행 로봇 제작 프로젝트 #4 (골반, 상체 설계1)
골반 쪽은 크게 할 거 없이 골반 쪽의 모터 2개 사이의 거리를 정하는 것과 흔들리지 않게 고정하는 것만 하면 될 거 같다.
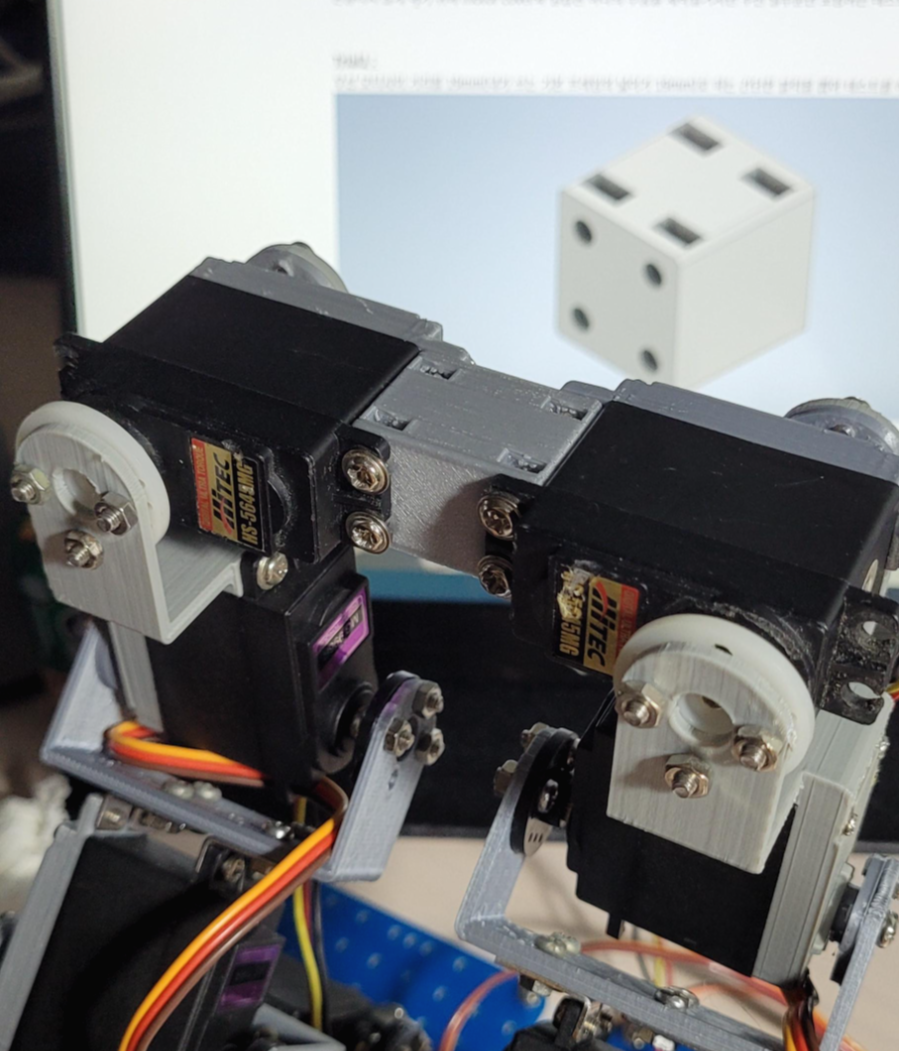
흔들리지 않게 하기 위해 motor cover와 결합된 하나의 부품을 제작할 예정이지만 우선 일부분만 포함하는 테스트 모델을 뽑아서 확인했다.
Trial1 :
우선 모터사이 거리를 19mm(내가 쓰는 기본 프레임의 넓이가 19mm)로 하는 간단한 블럭을 뽑아 테스트를 해보자.
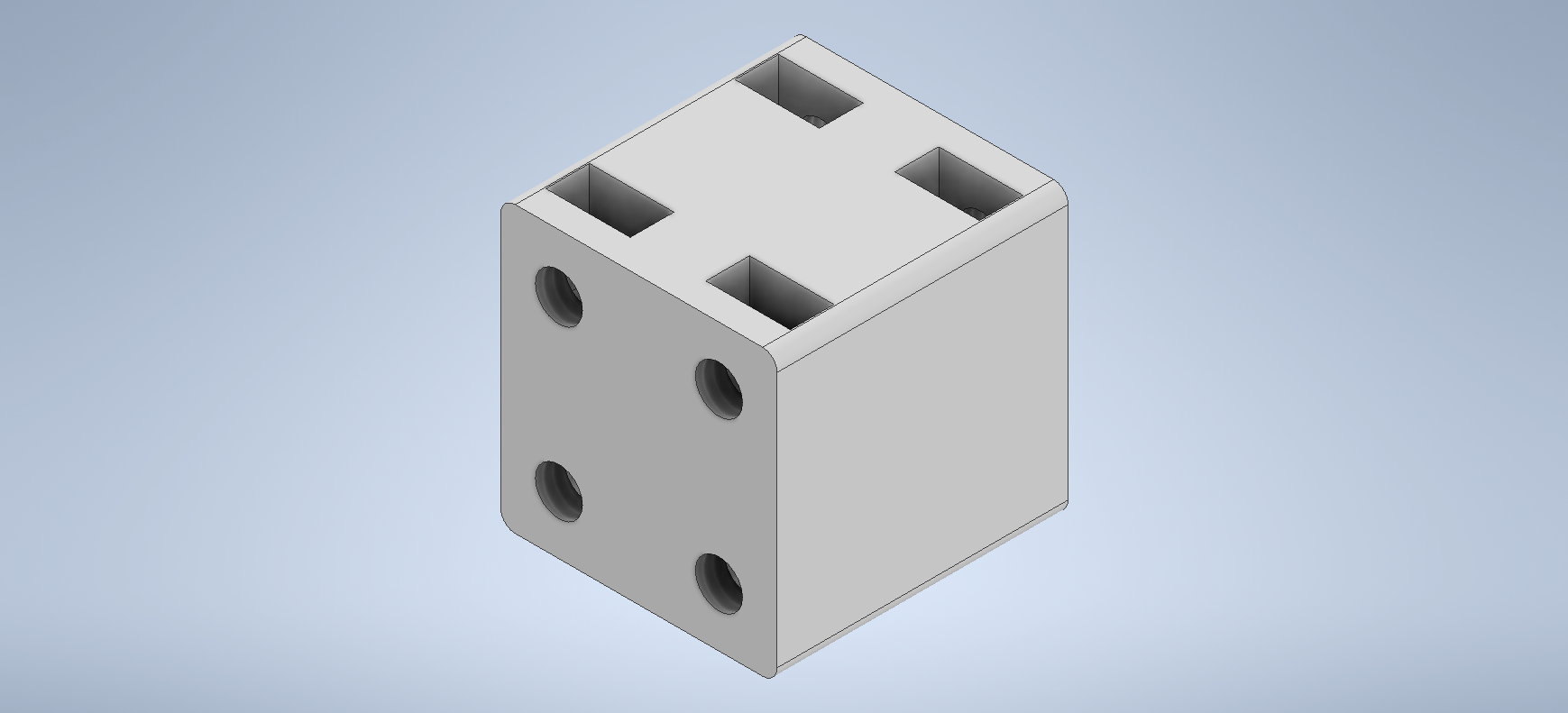
motor cover만 없는 부분이며 구멍이 있는 면을 앞이라 했을 때 앞부분은 골반 모터와 볼트 연결을 하고 뒷부분은 모터 커버와 결합된 형태로 뽑을 예정이다.
상단의 네모난 구멍은 너트를 넣기 위한 구멍이다.

1. 너트 구멍은 정말 잘 나왔다. 다만 구멍이 작아 support를 빼는 데 상당히 애먹었다.
>>support를 없애도록 수정
2. 위, 아래 구멍사이의 간격이 너무 좁다. 모서리 기준 2mm로 했더니 다른 부품의 설계와 맞지 않다.
>>모서리 기준이 아닌 중심선 기준으로 간격 10.301mm로 변경 (다른 부품 구멍 간격 measure 측정값)
3. 골반 사이 간격이 생각보다 많이 좁다. 대충 다리를 들어도 무릎에서 부딫힌다.
>>19mm에서 28mm (기본 프레임 3칸의 너비)로 변경
Trial2 :
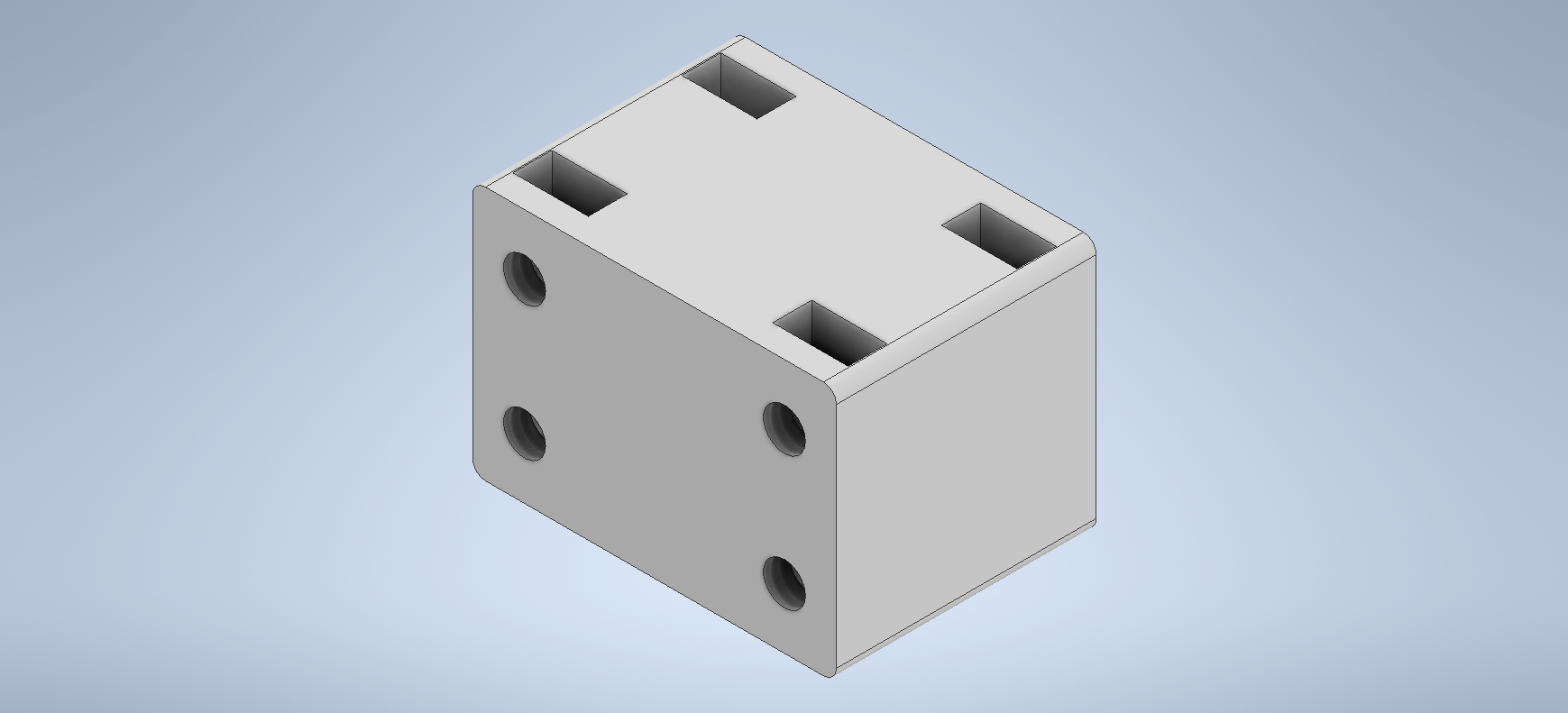
Trial1의 2,3의 수정사항은 그대로 적용하고 1같은 경우는 그냥 CURA에서 support 옵션 자체를 꺼버렸다.
그간 아예 떠 있는 부분(이 경우는 너트 구멍부분)이 support가 없으면 building중에 무너질거라 생각해서 꼭 support를 넣어왔는데 얘를 뽑아보니 그게 아니란 거를 알았다.
되려 support를 썼을 때보다 깔끔하게 나왔다. 작은 모형이나 떠 있는 부분이 무게를 크게 받지 않으면 support를 굳이 안써도 되는 거 같다.
앞에 다른 부품들은 블로그 기록 전이라서 없지만 한 7,8번은 수정 한 거 같은데 얘는 2번만에 만족스러운 출력물이 나왔다.
우선 이 상태로 걷는 동작과 발바닥 설계를 대충 해보고 골반 모터 사이만 다시 조정해주면 될 거 같다.
추후 motor cover랑 합친 부품을 만들 때 추가하면 좋을 거 같은 사항도 몇 개 있다.
1. 볼트가 느슨해지거나 충격에 위,아래로 흔들리는 것을 방지하기 위해 상,하단에 고정판을 추가

>>나중에 완성품을 보니 전혀 안흔들리고 잘 고정되어서 굳이 하지 않았다.
2. 상체 앞부분 면 장착을 위해 가운데 비어있는 부분을 좀 더 앞으로 나오게 설계
+) 다음에 할 일
- 2개의 수정 사항을 적용한 골반 프레임을 만드는 것
- 아두이노와 배터리가 올라갈 상체를 설계
- 발바닥 설계
- 모터 제어 SW찾기 및 적용 고민
===============================================================================
정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다.
틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글에 남겨주시면 감사하겠습니다. : )
===============================================================================