[후기] 2024 로보월드 관람 후기
이번 2024 로보월드는 10/23~10/26까지 킨텍스에서 열렸고 나는 첫날인 10/23 개막 직후에 다녀왔다.


확실히 첫날이라 그런지 사람도 많았고 체험이 가능한 부스도 많았다.
국회의원 이준석 님하고 알베르토 몬디도 오셨었다.
이번에는 시간 여유가 많아서 처음에 빠르게 한번 둘러본 후 다시 천천히, 기억에 남았던 곳들을 다시 둘러보는 식으로 관람을 했다.
다시 둘러 봤던 곳들 중에서도 인상에 남았던 것들을 이번 글에 정리했다.
뉴로메카(Neuromeka)
뉴로메카 메인부스 옆 쪽에서 매니퓰레이터의 원격교시, 순응제어를 체험할 수 있는 공간을 운영하고 있었다.
매니퓰레이터를 학습시키는 방식 중에 교시(teaching)이라는 방식이 있는데, 로봇이 해야 하는 동작 학습을 위해 인간이 직접 매니퓰레이터의 관절을 움직여 end effector의 point나 아예 trajectory를 지정해 주는 방식으로 학습시킨다.
하지만 영상의 뉴로메카 로봇은 로봇의 관절을 직접 연결하는 게 아닌 VIVE의 컨트롤러를 이용해서 원격교시를 할 수 있었다.
전시회에서 이것을 봤을 때는 신기했는데 다시 생각해보니 기존의 매니퓰레이터 Teleop랑 뭐가 다른 건가 싶어서 조금 검색을 해봤고, 뉴로메카의 기술교시 관련 영상을 통해 더 자세한 것을 배울 수 있었다.
https://www.youtube.com/watch?v=7yibfXF4DtI
아래는 영상을 보고 정리한 뉴로메카 기술교시의 특장점을 정리한 것이다.
ⓐ간단한 디바이스(VIVE) 1개로 6DOF 매니퓰레이터의 원격제어를 부드럽게 할 수 있다.
ⓑ기존 직접교시 방식은 무거운 로봇을 직접 움직여 학습시키기에 부드러운(가속도가 있는) 동작의 학습이 힘들뿐더러, 섬세한 동작을 구현하기도 어려웠다. 뉴로메카의 기술교시는 원격으로 교시를 하기에 이러한 동작의 교시가 가능하다.
ⓒ위험한, 직접교시가 불가능한 환경의 작업을 원격교시로 학습시킬 수 있다.
원격교시도 재밌었지만 이 부스가 내 기억에 남았던 이유는 순응제어라는 키워드 때문이었다. 이런 새로운 키워드를 배울 수 있다는 점이 내가 매년 로보월드에 가는 이유이다.
현장에서는 순응제어에 대해서 '외력이 가해졌을 때 이에 저항하지 않고 밀려났다가 외력이 제거되면 원래의 위치로 돌아오는 제어'라는 설명을 들었다.
현장에서 설명을 들었을 때는 안전성(safety)외에는 순응제어의 목적이 떠오르지 않아서 집에 와서 순응제어에 대한 내용을 추가로 찾아보았다.
두산로보틱스 User manual/ PART 2. 로봇 시작하기/ Step4. 태스크 프로그램 생성하기/ 순응, 힘 제어하기
https://manual.doosanrobotics.com/ko/user/2.12/2.-A-Series/-48
순응/힘 제어 이해하기
OPTIONAL HARD 20 MIN 힘 제어(Force Control)와 순응 제어(Compliance Control)는 로봇의 힘을 제어하는 기능입니다. 또한 모션 명령어를 추가하는 경우 모션 이동과 동시에 힘을 제어할 수 있습니다. 순응 제어
manual.doosanrobotics.com
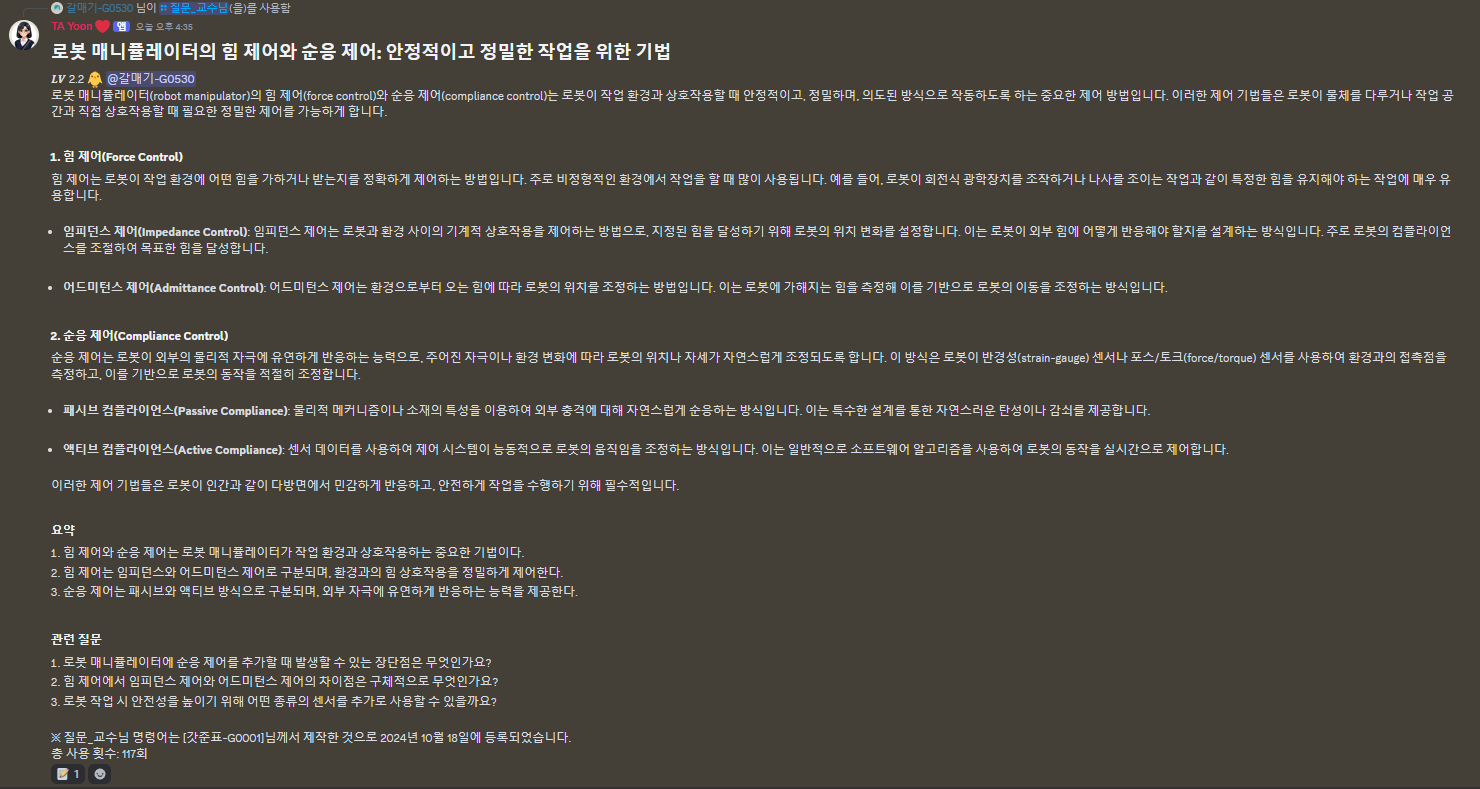
갓준표 AI 질문: Can you explain the force control and compliance control of the robot manipulator?

https://discord.com/invite/nMtcEyKHg5
Godjunpyo AI Discord 서버에 가입하세요!
Godjunpyo AI provides exceptional learning experiences through the integration of philosophy, technology, and users. | 멤버 1193명
discord.com
정리하면 힘 제어와 조합해서 '①작업물의 표면에 힘을 가해야 하는 작업을 ②예상치 못한 충돌에 의한 파손을 방지하며 수행이 가능'하도록 할 수 있다는 것이다.
기계공학의 용어를 사용하면 매니퓰레이터의 강성(Stiffness)를 제어할 수 있다는 것이다.
테솔로(TESOLLO)
테솔로는 이전 박람회부터 Delto 라인업 그리퍼의 디자인과 부드러운 움직임이 기억에 남아서 계속 이름을 기억하고 있던 회사였다.
이번에는 2대의 매니퓰레이터와 그리퍼를 이용하여 양손 Teleop를 시연했는데 물건을 잡고 손 안에서 조작하는 것이 굉장히 부드러웠다.
담당자분께 여쭤보니 DG-5F 모델로 20DOF 라고 하셨다.
다만 현재 시연에 사용중인 핸드는 햅틱 등의 피드백 시스템은 따로 넣지 않았다고 한다. 접촉 피드백이 있으면 한 층 더 정교한 inhand manipulation이 가능할 것 같아 기대가 된다.
케미콘시스템
이 부스의 로봇은 내가 지금 졸업 논문으로 만들고 있는 자벌레 로봇과 연관이 있어서 기억에 남았다.

자력을 이용해서 강자성체 표면에서의 표면작업, 고압 세척등을 하는 로봇이라고 한다.
이 로봇은 내 처음 예상과는 달리 전자석이 아닌 영구자석을 사용했는데 그 이유를 여쭤보니 안정성 때문이라고 하셨다.
연구용이 아닌 실제 현장에서의 사용을 목적으로 한 로봇이기에 100% 믿을 수 있는 영구자석을 사용했다고 하셨다.
사용 후 로봇의 탈착은 바퀴쪽에 쇄기 같은 것을 넣어서 떼어낸다고 한다.
한편으로는 전류가 흐를 때 자성이 생기는 전자석(Electromagnet)이 아닌 평소에 자성이 있고 전류가 흐를 때 자성이 사라지는 영구전자석(Electropermanent magnet, EPM)을 사용하면 어떨지에 대한 생각도 들었다.
로보티즈(ROBOTIS)

로보티즈는 이번에 개미(GAEMI)와 다이나믹셀 홍보 부스를 운영했다.
자율주행 서비스 로봇에 관심이 크지는 않았지만 로봇 신문이나 유튜브로 계속 소식을 들었었고, 실제로 로봇이 현장(양천구 공원)에 배치된 사례이기에 기억하고 있었다.
손잡이로 개미 더듬이를 표현한 디자인은 개인적으로 되게 맘에 들었다.
사실 로보티즈 부스가 가장 기억에 남았던 건 개미 때문이 아니라 거기서 표윤석 박사님을 직접 만났기 때문이다.
박사님의 ROS1 강의로 ROS에 입문 했고, 갓준표 커뮤니티 활동 전에는 오로카에서 시간을 보냈기에 표윤석 박사님이 무척 반가웠다.
박사님께 강의랑 책을 잘 봤다고 말씀드리니 바쁜 와중에도 밝게 웃으면서 인사를 해주셨다.
동시에 중요한 말씀을 해주셨다.
"지금 ROS 뭐 쓰고 있어요? ROS1은 이제 끝났어요. 곧 지원도 끊기고. 얼른 ROS2로 옮기세요."
솔직히 이제 ROS2가 표준이 될거고, ROS1은 끝날 거라는 거는 이미 알고 있었지만 그럼에도 2로 넘어가지 않았던 것은 1도 충분히 편하다고 생각했고, 아직 많은 연구실이 호환성, 쓰던 게 편하다는 이유로 넘어가지 않는 것을 알고 있었기 때문이었다.
어떻게 보면 굳이 새로운 것을 배워야 하나 느낌이 강했던 것 같다.
그런데 ROS 개발에도 꾸준히 참여하시고, 국내에서 ROS 강의하면 먼저 떠오르는 분이 저렇게 말씀을 해주시니 정신이 확 들었다.
이를 계기로 나는 내년 대학원 입학 전까지 기존에 쓰던 ROS1 개발 환경을 ROS2로 바꿀 계획을 세웠다.
역시 여러 이유를 늘어 놓는 것보다 하나의 계기가 사람을 움직이는 데에는 더 중요한 것 같다.
(현장이 너무 정신 없어서 사진을 못 찍었다.....)
서울로봇고등학교
마지막으로 인상 깊었던 부스는 서울로봇고등학교의 학생들이 운영하던 부스였다.
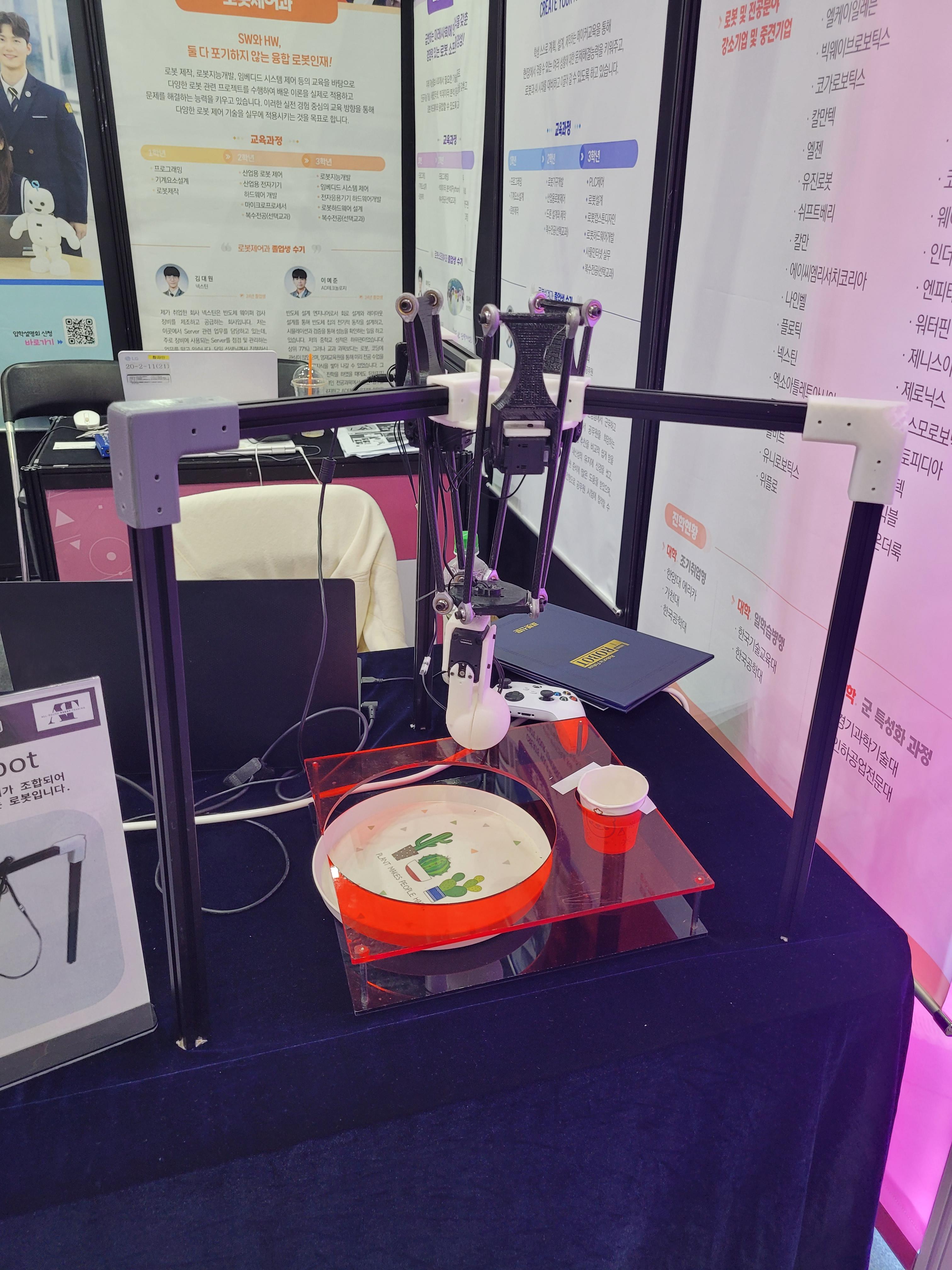

델타로봇, Teleop , 4족 보행 등의 로봇이 있었는데 3개는 완성도가 상당히 좋았다.
델타 로봇은 아쉽게도 내가 갔을 때는 동작하는 것을 보지는 못했지만 역기구학을 고려해서 설계를 했다고 하는 만큼 잘 작동할 거 같았다.
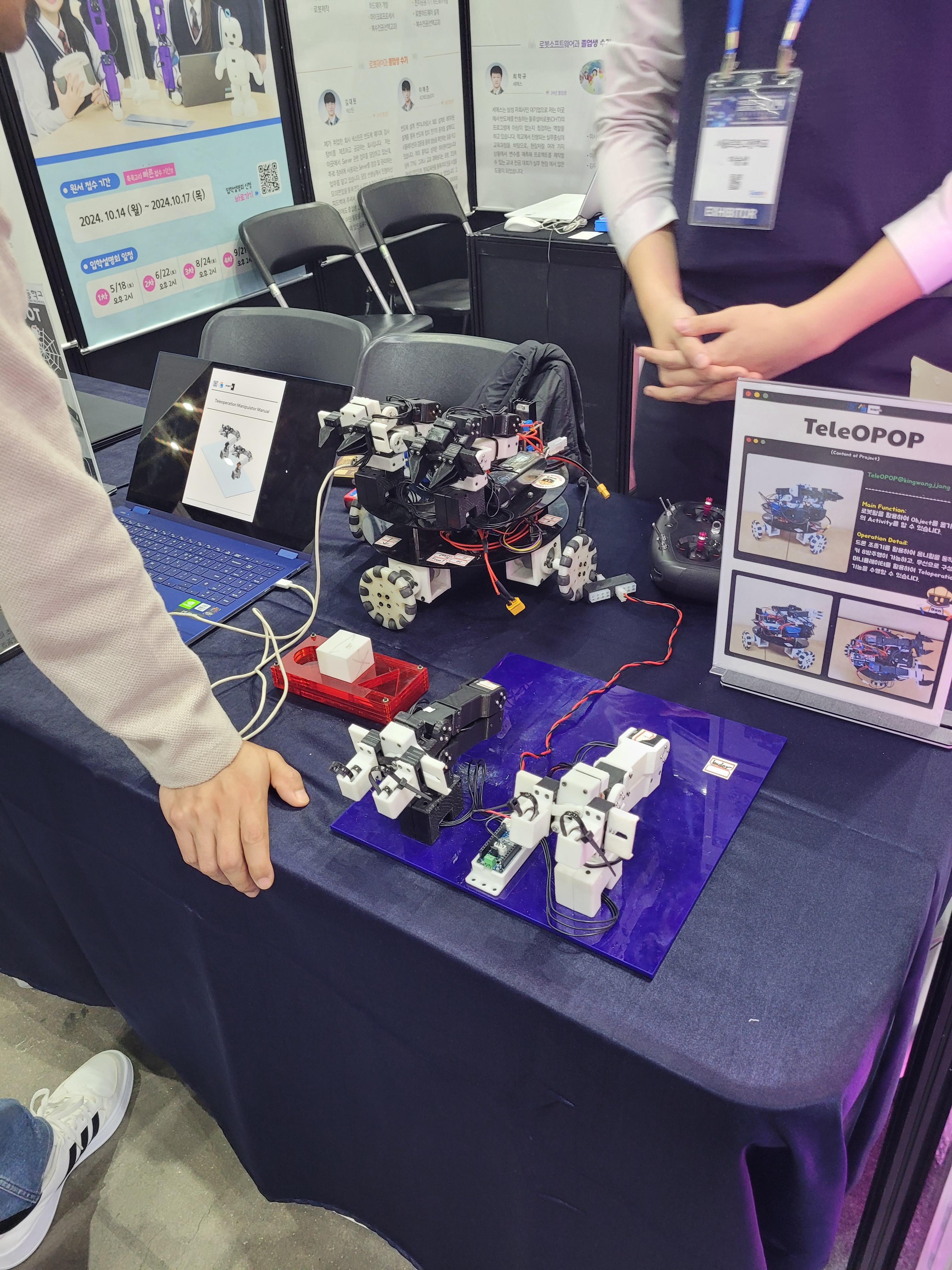
TeleOPOP라는 로봇도 물어보니 아두이노 기반 + 블루투스 통신을 사용한다고 하면서 메시지 타입으로 string을 쓴다는 등 자세히 설명을 해줬다.
+) 나는 이 로봇을 보고 다이나믹셀을 센서로 쓸 수 있는 것을 처음 알았다.
아래는 따로 정리하지는 않지만 재밌게 봤던 부스 사진과 영상이다.
에이로봇(Aei Robot)

+) 한양대 한재권 교수님이 CTO로 계신 회사다.
에이딘로보틱스(AIDIN ROBOTICS)
로보케어
KNR System
올해는 비교적 여유롭게 로보월드를 둘러볼 수 있었다. 매년 올 때마다 이제는 좀 지겹지 않을까 싶다가도 막상 오면 재밌게 관람했었다.
내년에도 시간 나면 또 올 생각이다.
========================================================================
정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다.
틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글에 남겨주시면 감사하겠습니다. : )
========================================================================