C-2345 자세 제어 4족보행 로봇 #1
방학 중에 동아리 형한테 연락이 왔었다.
3학년, 4학년, 5학년(졸업생)이 한 팀(그래서 팀이름이 c-2345이다)으로 가볍게 취미 느낌으로 4족 보행 로봇을 만드는데 2학년인 나도 참여할 것인지 연락이 왔다.
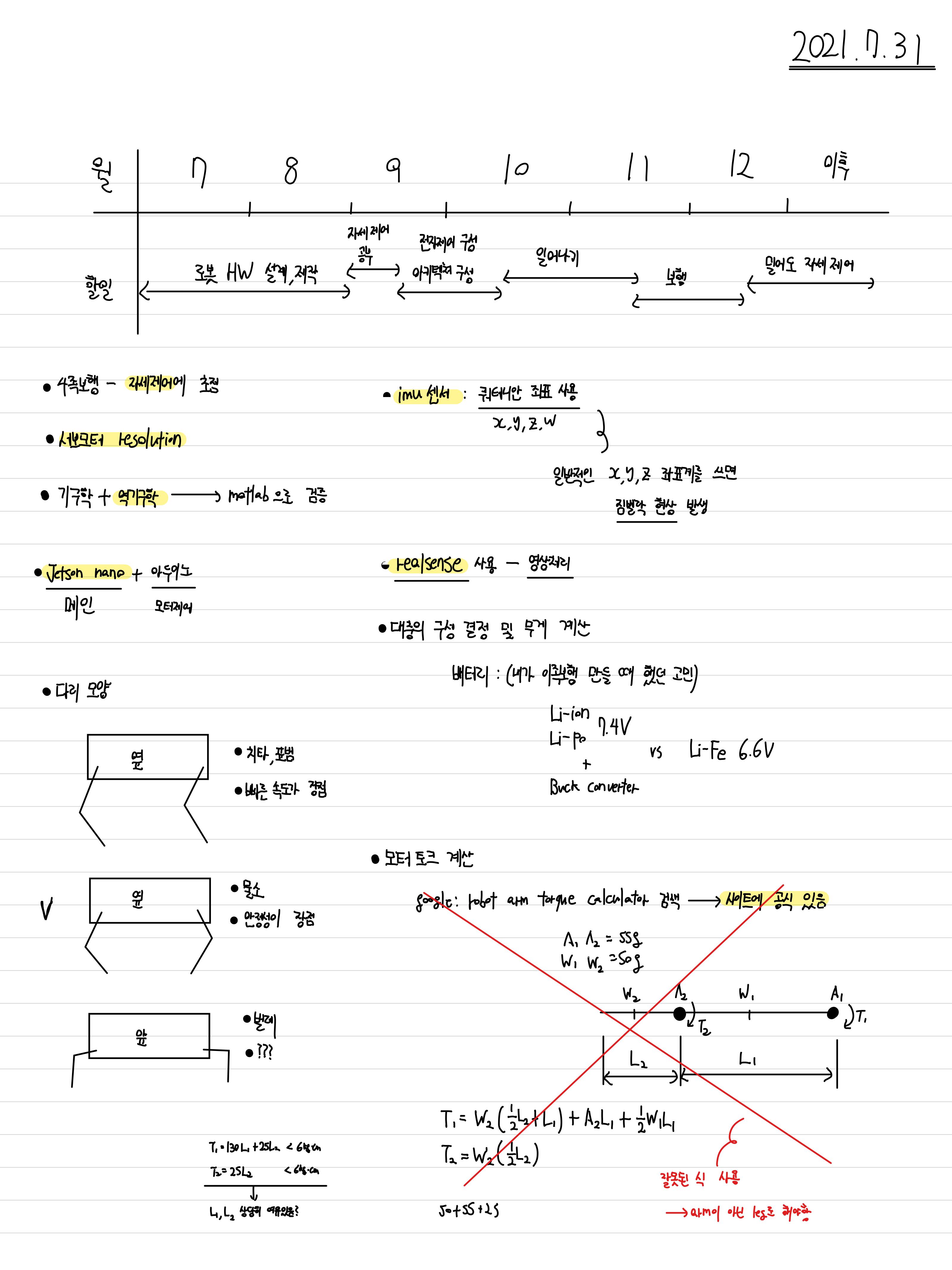
이번 방학에 시작해서 올해 안으로 자세 제어와 걷기가 가능한 4족 보행을 만드는 것이 목표라고 했다.
다들 실력자들이여서 내가 과연 도움이 될까 싶었지만 언제 이렇게 프로젝트에 참여해볼 수 있을까 해서 바로 한다고 했다.
첫날 회의 때는 내가 모르는 것이 많아서 일단은 아는 부분은 회의에 적극 참여하고 모르는 부분은 키워드를 적고 그때 그때 대충 검색해봤다.
당분간은 그 키워드나 회의 내용을 정리해서 혼자 공부해봐야 형들 진도를 따라잡을 수 있을 거 같다.
●Keywords (틈틈히 공부하다 시간이 날 때 마다 정말 간단하게만 채울 예정)
-자세 제어 :
로봇의 position(xyz+rpy)를 외부의 힘에 저항해 유지하는 것이다. 구체적으로 우리가 할 4족 보행 로봇은 경사에서도 몸체의 수평을 유지, 외부의 힘에도 넘어지지 않고 자세 유지, 장애물 위에서 몸체의 수평 유지 등을 할 계획이다.
추가로 관련된 짧은 논문이 있어서 같이 읽어봤다.
정학상 외, 「자이로 센서를 이용한 4족 보행 로봇의 자세 제어」, 『대한전기학회 하계학술대회 논문』, 대한전기학회, 2010, pp.1836-7.
-Servo motor resolution :
+)회의 때 나온 키워드는 아니고 내가 합류하게 이전 회의록에 이 부분의 공부 내용이 있어서 추가했다.
https://electronics.stackexchange.com/questions/234788/micro-standard-servo-resolution
Micro/standard servo resolution
I am building a project which requires a very fine servo resolution (<=.1 degree). I understand there is a lot that goes into servo resolution like digital v analog, dead-band, # of poles, etcet...
electronics.stackexchange.com
https://dovermotion.com/resources/motion-control-handbook/resolution/
Stepper Motor Lead Screw | Dover Motion
Dover Motion shares their expertise in this article about stepper motor lead screw resolution and its importance in designing a motion system.
dovermotion.com
위 2개의 글을 읽어보았다. (제대로 해석/이해 한건지는 모르겠다...)
모터의 resolution(분해능, 해상도?)는 컨트롤러의 명령에 의해 모터가 최소로 움직일 수 있는 각도를 의미한다고 한다.
스텝모터와 서보모터는 작동 방식이 다르기에 resolution을 결정하는 요인 또한 다르다.
우리가 쓸 rc용 서보모터의 경우 deadband가 가장 큰 요인이라고 한다. 디지털 서보가 아날로그에 비해 deadband가 작기에 resolution이 더 크다.
+)(resolution이 큰게 더 작은 각도를 움직일 수 있다는 건지 못찾겠다. 일단은 클수록 더 작은 각도 작동이 가능하다로 알고 있어야 겠다.)
디지털 서보의 경우 프로그램으로 이 deadband를 줄여 resolution을 높일 수 있다고 한다.
deadband외에도 모터 내의 기어의 구성, encoder역할을 하는 potentiometer(가변저항), 회로 등에 따라서도 resolution이 달라진다.
+)2022년 5월에 서보모터에 대한 추가 공부를 했다.
https://istein.tistory.com/50?category=939288
[공부] 서보모터 이해하기 #1
+) 그간 몸이 너무 안좋아서 계속 누워만 있고 병원다니고 휴학까지 했다가 이제 겨우 좀 회복되어서 다시 블로그를 관리한다... 서보모터 자체는 되게 오래전부터 써왔지만 그냥 전원과 신호선
istein.tistory.com
-기구학, 역기구학 :
표윤석 박사님의 강의에서 이 부분이 나왔다.
https://istein.tistory.com/23?category=881417
C-2345 자세 제어 4족보행 로봇 #12 (ROS 13강-Manipulation, ROS기초 강의 完)
+) 12강 서비스 로봇은 간단한 설명 위주라 따로 복습은 하지 않았다. ●13강 https://www.youtube.com/watch?v=5c7s4jgB00k 표윤석 박사님의 ROS강의 마지막 챕터였다. ●Keyword -Manipulation, MoveIt!, KDL,..
istein.tistory.com
-Jetson Nano, Arduino :
https://developer.nvidia.com/embedded/jetson-nano-developer-kit
Jetson Nano Developer Kit
The power of modern AI is now available for makers, learners, and embedded developers everywhere. NVIDIA Jetson Nano Developer Kit is a small, powerful computer that lets you run multiple neural networks in parallel for applications like image classificati
developer.nvidia.com
Jetson Nano, 젯슨 나노는 쉽게 말하면 그냥 우리가 쓰는 컴퓨터 본체랑 기능이 거의 같다(싱글보드 컴퓨터). os도 설치가 가능하고 모니터를 연결해 컴퓨터 처럼 쓸 수 있다.
다만 로봇, 기계 학습등에 사용하기 위해 소형화되었고 다른 보드에 비해 gpu가 뛰어나 AI, 딥러닝, 영상처리에 더 뛰어나다고 한다.
아두이노에는 ros를 설치할 수 없기에 이 젯슨 나노에 ros를 설치하고 아두이노는 모터제어, 센서 데이터 수집에 이용해 젯슨나노-아두이노 간의 통신을 이용할 예정이다.
비싸다. (약 15만원)
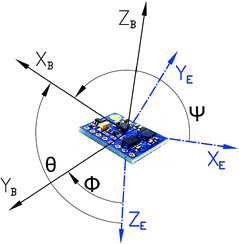
-imu :
Inertial Measurement Unit의 약자로 시스템의 기울기, 가속도, 자기장을 측정하는 센서이다.
내가 갖고 있는 mpu6050 또한 자이로스코프, 가속도계를 가지고 있는 imu이다.
이번 프로젝트에는 형들이 갖고 있는 더 비싸고 좋은 imu를 쓴다고 한다.
-realsense, 영상처리 :
우선 realsense는 intel에서 만든 깊이 카메라(depth camera)로 일반적인 카메라와 달리 사진/영상이 깊이 정보를 포함한다.
즉 사진에서 어디가 더 멀리 있고 가까이 있는지를 데이터로 받을 수 있다.
영상처리는 depth camera등으로 받은 영상에서 물체 인식, 공간 분석, 글자 인식 등을 하는 것이다.
--------------------------------------
●대충의 무게 계산
●모터 토크 계산
===============================================================================
정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다.
틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글에 남겨주시면 감사하겠습니다. : )
===============================================================================